

A Front Vehicle Detection Method Applicable to Complex Scenes
A technology for vehicles in front and complex scenes, applied in the field of vehicle detection in front, can solve problems such as insufficient information, reduced detection effect, weak relative optical flow field, etc., to achieve the effects of reducing uneven illumination, enhancing detection effect, and reducing time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
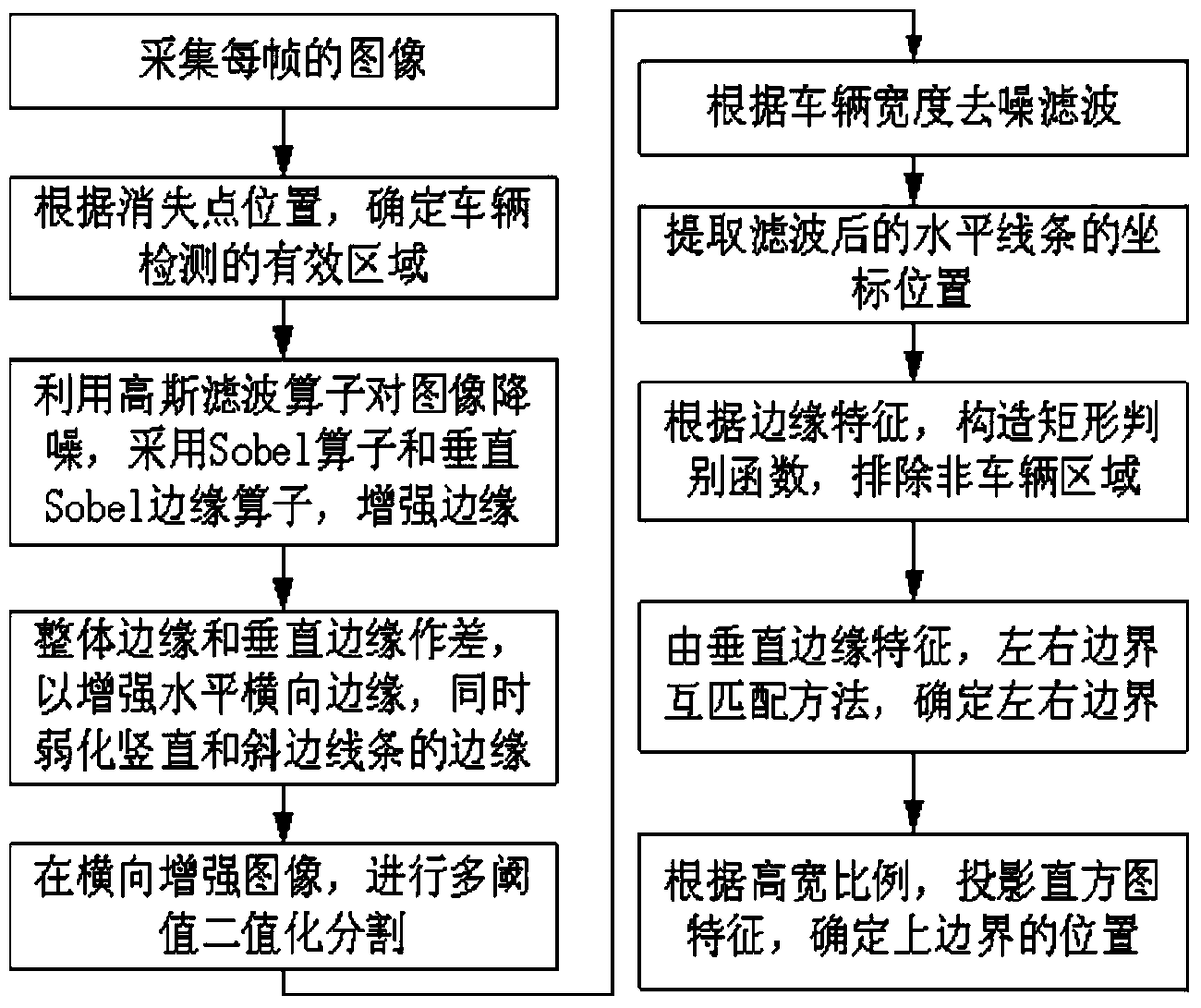
[0042]Example: as figure 1 As shown in the figure, a front vehicle detection method suitable for complex scenes. In the first step, according to the position of the vanishing point's Y-axis component VanishPoint.y, the area under VanishPoint.y is set as the effective area for vehicle detection [VanishPoint. y, Height], and perform image preprocessing such as filtering, edge enhancement, and horizontal edge enhancement on the effective area [VanishPoint.y, Height] to obtain the vehicle horizontal line feature map HorSrc and grayscale map Src, highlighting the vehicle horizontal line features.
[0043] Wherein, obtaining the vehicle horizontal line feature map HorSrc includes the following steps:
[0044] (a) use Gaussian filter operator to smooth and denoise the effective area of the image; use the Sobel edge operator to extract the edge map of the effective area of the image, denoted as SobImg;
[0045] (b) Using the vertical Sobel edge operator Extract the edge map in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More