Bionic running four-leg robot
A quadruped robot and spine technology, applied in the field of robotics, can solve the problems of inconvenient control and improvement of motion stability, and achieve the effects of easy adjustment, increased motion stability, and good motion flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the drawings and embodiments.
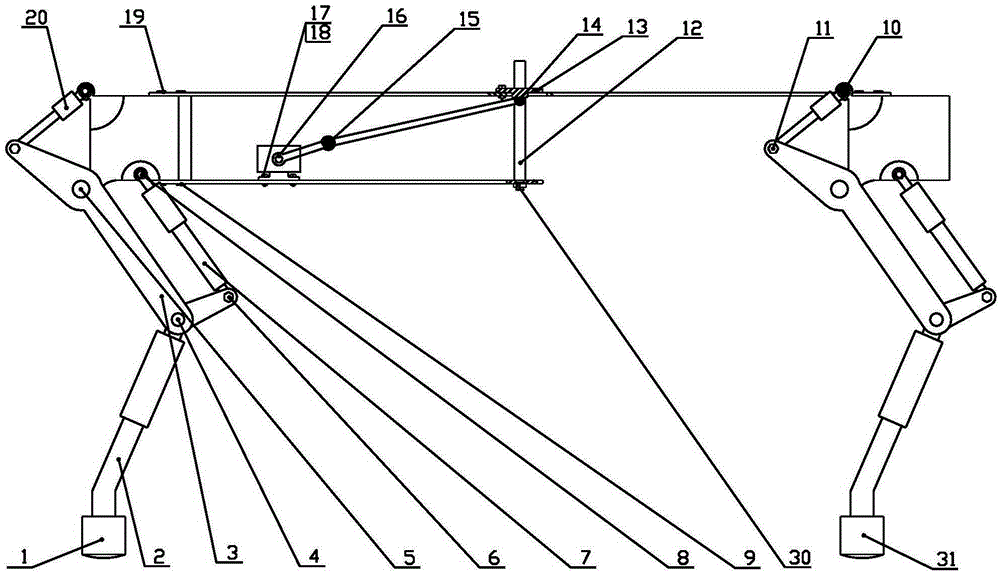
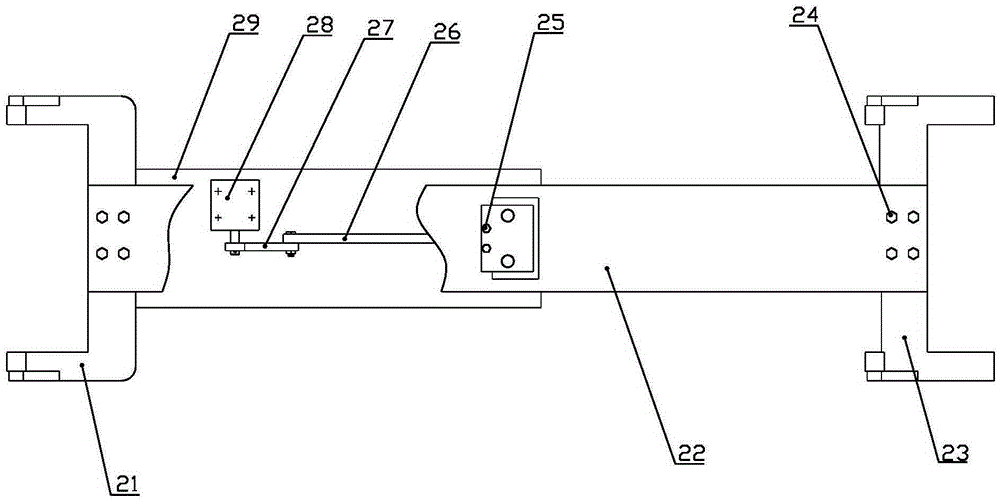
[0035] Such as figure 1 , figure 2 As shown, the bionic running quadruped robot mainly includes a leg, a front shoulder beam 21, a back shoulder beam 23, a spine 22, a waist slider 13 and a cylindrical guide rail 12. The spine 22 is a thin plate, one end of which is fixed to the middle of the front shoulder beam 21 by the eleventh bolt 19, and the other end is fixed to the back shoulder beam 23 by the twelfth bolt 24. A square groove is opened in the middle of the spine 22, and the waist slider 13 is fixed to the spine 22 by the thirteenth bolt 25, two circular through holes are opened in the middle of the waist slider for the two cylindrical guide rails 12 to pass through, and the circular protrusion at the lower part of the waist slider has a circular hole, The lumbar sliding block and the first connecting rod 26 are hinged through the eighth bolt 14. The two cylin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More