

Single-core low-speed six-wheel miniature micro-mouse full-digital navigation servo system controller
A servo system and servo control technology, applied in two-dimensional position/channel control and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
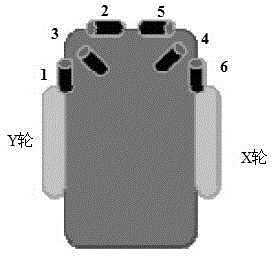
[0065] Below in conjunction with accompanying drawing, the present invention will be further described. The front end of the pico mouse is the side of the pico mouse close to the first sensor S1, the second sensor S2, the third sensor S5 and the fourth sensor S6, the middle part of the pico mouse refers to the midline of the pico mouse, and the rear end of the pico mouse refers to the For the picomouse side of the first sensor S1 , the second sensor S2 , the third sensor S5 and the fourth sensor S6 , refer to the accompanying drawings for specific positions. The lower surface of the picomouse refers to the surface opposite to the surface on which the battery, the first sensor S1 , the second sensor S2 , the third sensor S5 , the fourth sensor S6 , etc. are located. The first motor X, the second motor Y, the third motor Z, the fourth motor R, the fifth motor U, and the sixth motor W are respectively corresponding to the X wheel, the Y wheel, the R wheel, the Z wheel, the U whee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More