

Area segmentation method based on cleaning robot
A technology for cleaning robots and area segmentation, applied in the field of robots, can solve problems such as multiple mappings, and achieve the effects of eliminating idle burrs, enhancing reliability, and improving cleaning efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] In order to more clearly illustrate the embodiments of the present invention or the technical solutions in the prior art, the specific implementation manners of the present invention will be described below with reference to the accompanying drawings. Obviously, the accompanying drawings in the following description are only some embodiments of the present invention, and those skilled in the art can obtain other accompanying drawings based on these drawings and obtain other implementations.
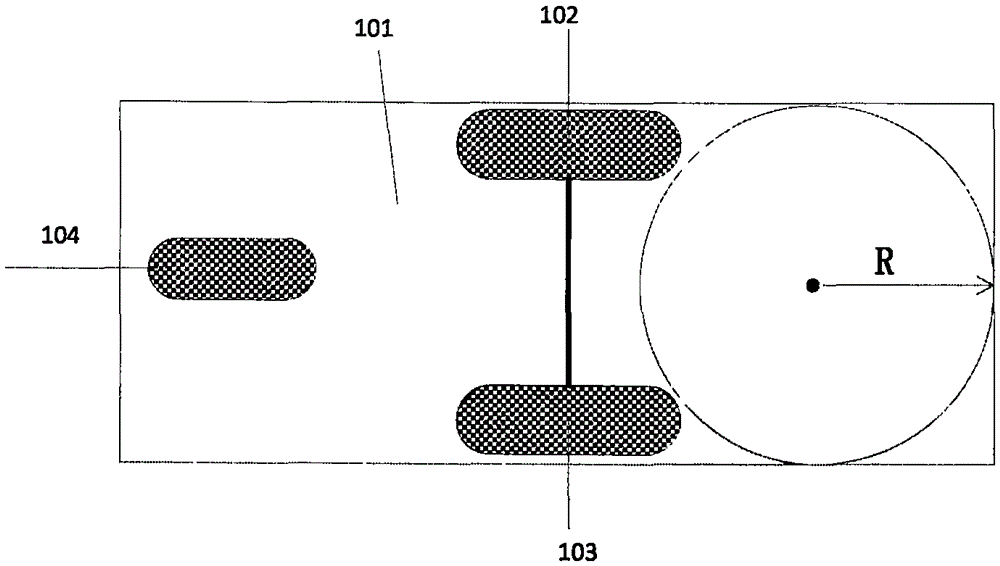
[0080] Such as figure 1 Shown is a schematic view of the structure of the cleaning robot 101 in the present invention. As can be seen from the figure, the cleaning robot 101 includes a front wheel 104 of the cleaning robot, a right rear wheel 102 of the cleaning robot and a left rear wheel 103 of the cleaning robot. The entire border in is the size of the chassis of the cleaning robot, where R (unit: pixel) represents the radius of the maximum inscribed circle of the chassis of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More