

Artificial lateral line pressure detection method
A detection method and pressure technology, applied in the direction of fluid pressure measurement by changing ohmic resistance, can solve problems such as the failure of Doppler positioning technology, and achieve the effect of simplifying the sensing steps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
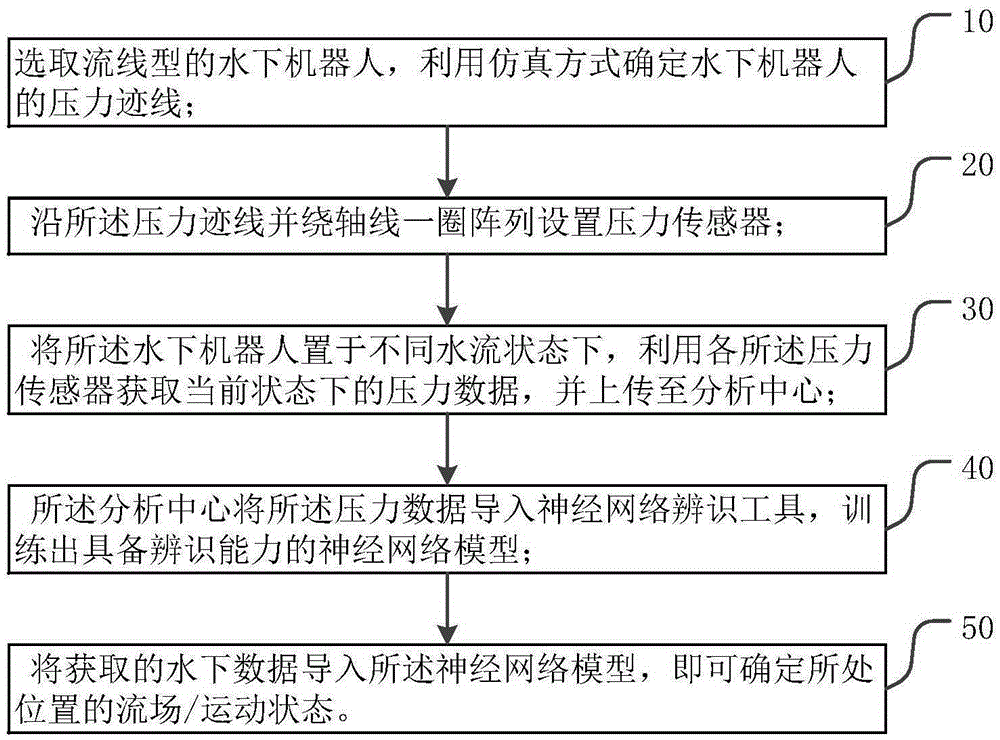
[0025] Such as figure 1 As shown, the artificial lateral line pressure detection method in one embodiment of the present invention generally includes the following steps:
[0026] Step 10, select a streamlined underwater robot, and use simulation to determine the pressure trace of the underwater robot;
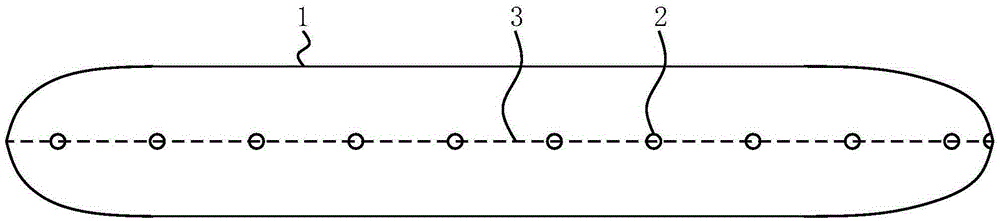
[0027] The streamlined underwater robot 1 has a regular geometric shape and good hydrodynamic performance, which facilitates the extraction of pressure data and the regular arrangement of measurement components.
[0028] Because when underwater robots 1 with different shapes cruise underwater, the distribution of pressure traces on the body surface is not the same. The simulation of this embodiment is to simulate and analyze the data obtained when the underwater robot 1 moves forward at a constant speed when the water flow has a certain flow rate and is in a static state. When determining the pressure trace of the underwater robot 1, the underwater robot 1 is also referred to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More