Excavator control device based on position control
A control device and excavator technology, which is applied to mechanically driven excavators/dredgers, earth movers/shovels, construction, etc. Unintuitive, it is difficult for the driver to coordinate several actions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
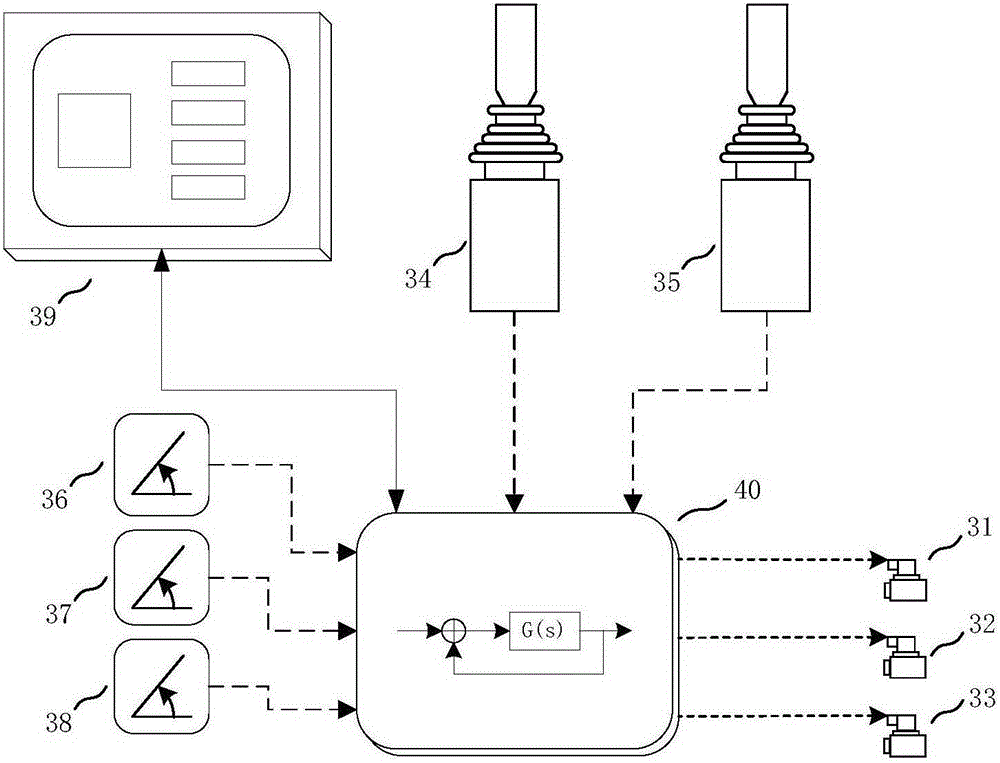
[0025] Such as image 3 As shown, the function of the controller 40 is to collect electrical signals from the left electric cross handle 34, the right electric cross handle 35, the bucket angular displacement sensor 36, the arm angular displacement sensor 37 and the boom angular displacement sensor 38, and through the software Control instructions of the bucket pilot solenoid valve 31 , arm pilot proportional solenoid valve 32 and boom pilot proportional solenoid valve 33 are obtained through calculation to control them.
[0026] The function of the display controller 39 is to interact with the driver: the driver selects the working mode through the display controller, including horizontal holding mode, vertical holding mode and bucket holding mode; the display controller d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com