A multi-sensor maneuvering target tracking method based on the principle of maximum entropy
A mobile target tracking, multi-sensor technology, applied in the direction of instruments, computer parts, character and pattern recognition, etc., to achieve the effect of accurate tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention adopts the maneuvering target tracking method based on fuzzy maximum entropy, such as image 3 Shown, the present invention realizes that maneuvering target is carried out tracking processing from following several steps:
[0029] Step 1, establish a multi-sensor measurement data set from the same target;
[0030] Step 2, calculate the degree of membership between the data in the multi-sensor measurement data set;
[0031] Step 3, obtain the cluster center through clustering processing, and complete the data merging of the multi-sensor measurement data set;
[0032] Step 4, use the interactive multi-model to filter and track the merged data to update the target;
[0033] Step 5, outputting the updated and processed target track data.
[0034] Among them, the derivation process of fuzzy clustering formula based on maximum entropy is as follows:
[0035] (1) Fuzzy clustering based on maximum entropy
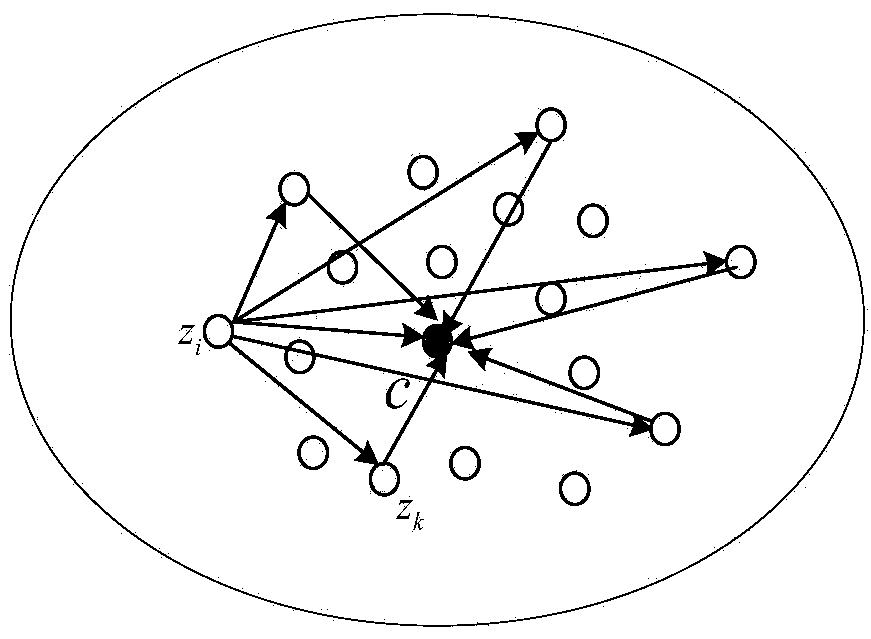
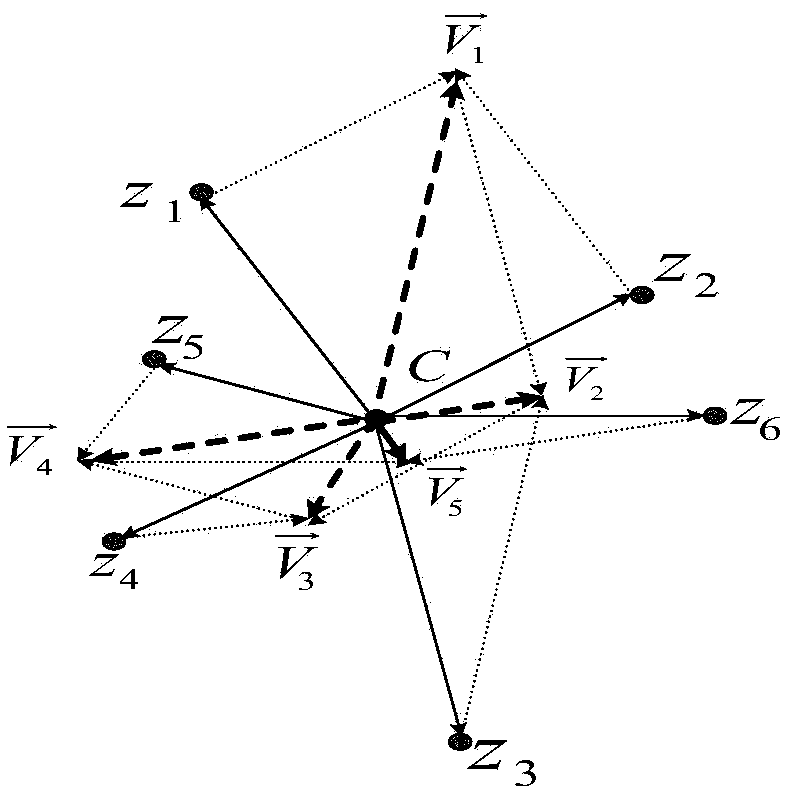
[0036] Assume that at time k the fusion cent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More