

Motion control method of ROV underwater robot
An underwater robot and motion control technology, applied in non-electric variable control, motor vehicles, underwater ships, etc., can solve the problems of stability, rapidity and accuracy of the underwater robot control system, and achieve Complete functions, high utilization efficiency and space saving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to better understand the technical features, technical content and technical effects of the present invention, the accompanying drawings of the present invention will now be described in more detail in conjunction with the embodiments.
[0025] Below in conjunction with accompanying drawing and embodiment the patent of the present invention is further described.
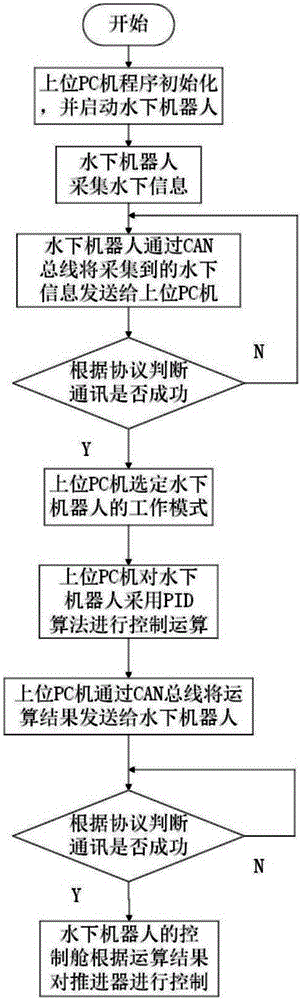
[0026] Such as figure 1 As shown, the present invention provides a kind of motion control method of ROV underwater robot, comprises the following steps:
[0027] Step 1, the host PC program is initialized, and the underwater robot is started;
[0028] Step 2, the underwater robot uses the attitude sensor, water depth sensor, ultra-short baseline and underwater camera to collect underwater information, and sends the information to the upper PC;
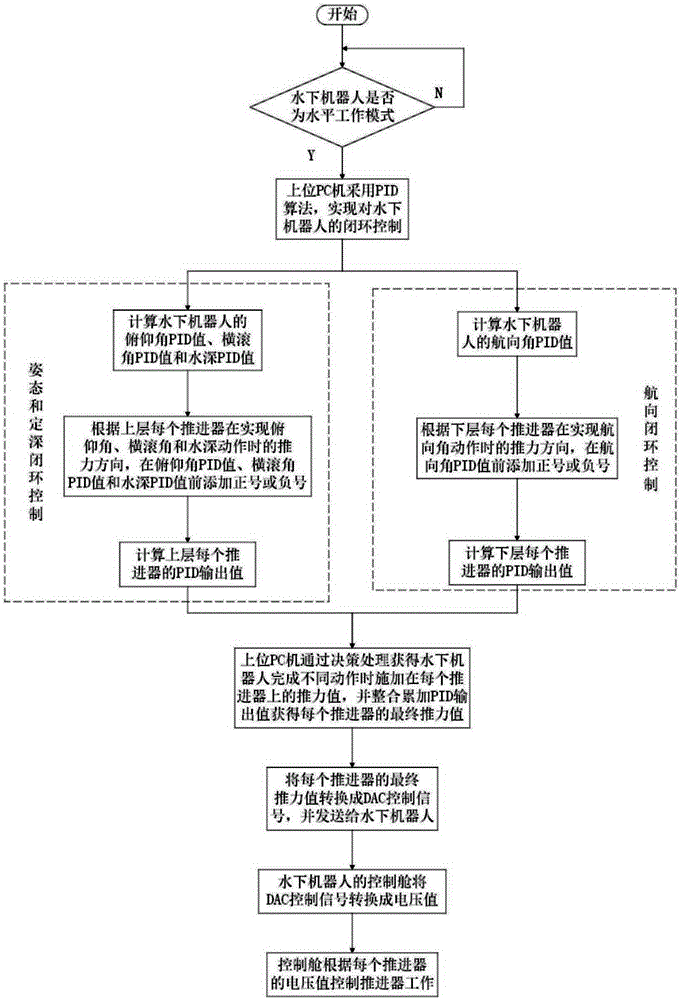
[0029] Step 3: The upper PC selects the working mode of the underwater robot, and then uses the PID algorithm of the limit weakening integral to control the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More