

A Multifunctional Hexapod Climbing Robot
A robotic and multi-functional technology, applied in the field of robotics, which can solve the problems of easy cam wear, complex control and low precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
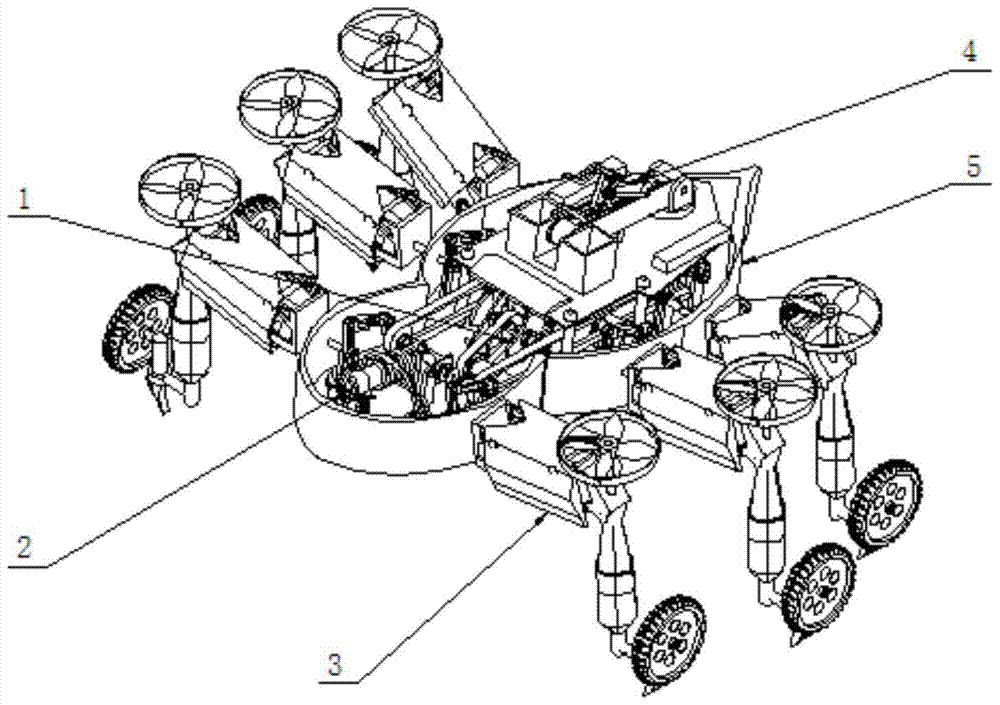
[0032] see figure 1 , the multi-functional hexapod climbing robot of the present invention includes a transmission module 1 , a flying claw module 2 , a leg module 3 , a grasping module 4 , and a shell module 5 in total of five parts.
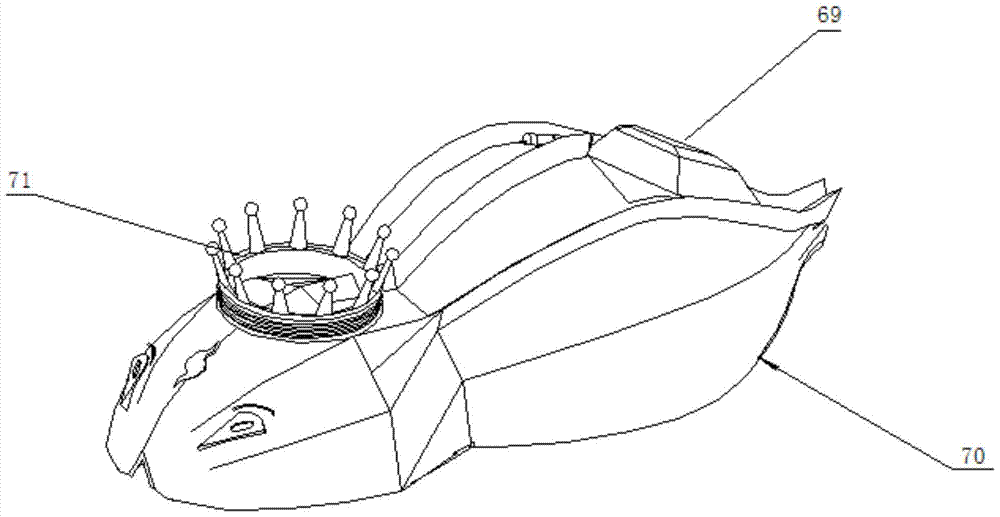
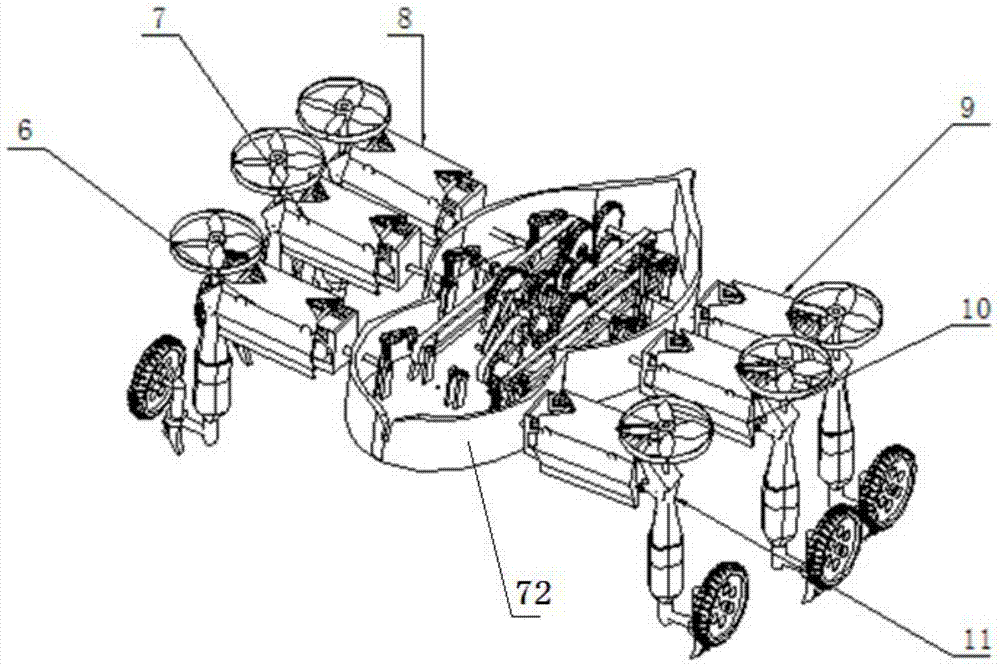
[0033] see figure 2 as well as image 3 , the housing module 5 is divided into two parts, the upper housing 70 and the lower housing 72 . The upper casing 70 adopts a hyperboloid design, and the rear half of the upper casing 70 is composed of six hyperboloid structures, with beautiful edges and corners, smooth curved surfaces and reduced air resistance; the front half of the upper casing 70 also adopts a hyperboloid design, and the top installation There is a CCD vision sensor 71 . The design of the lower housing 72 is based on the top view projection of the upper housing 70 to ensure that the upper and lower hous...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More