

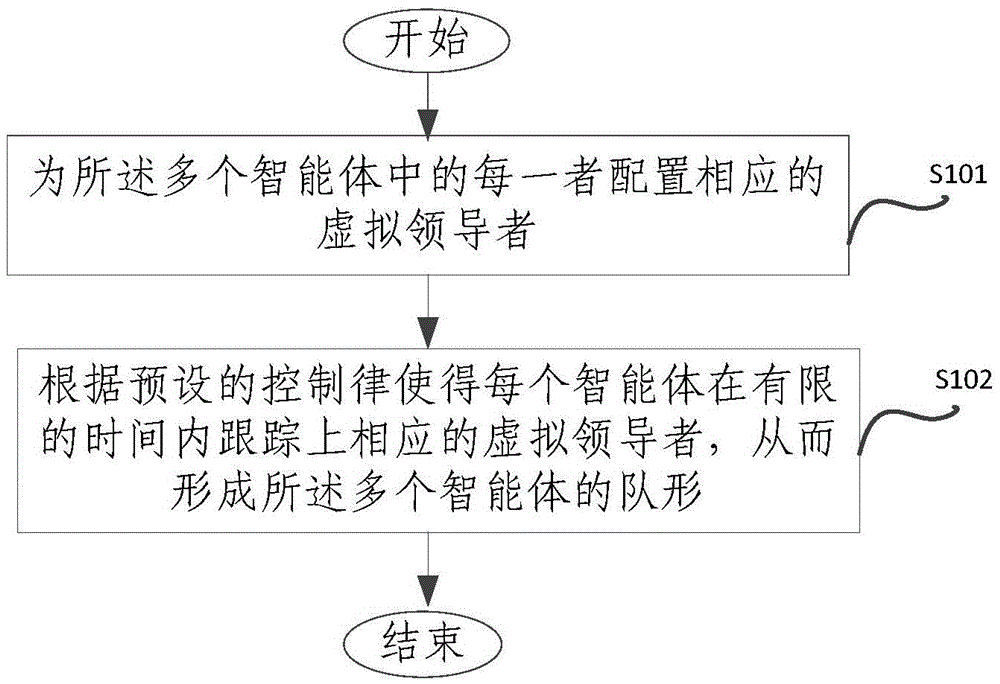
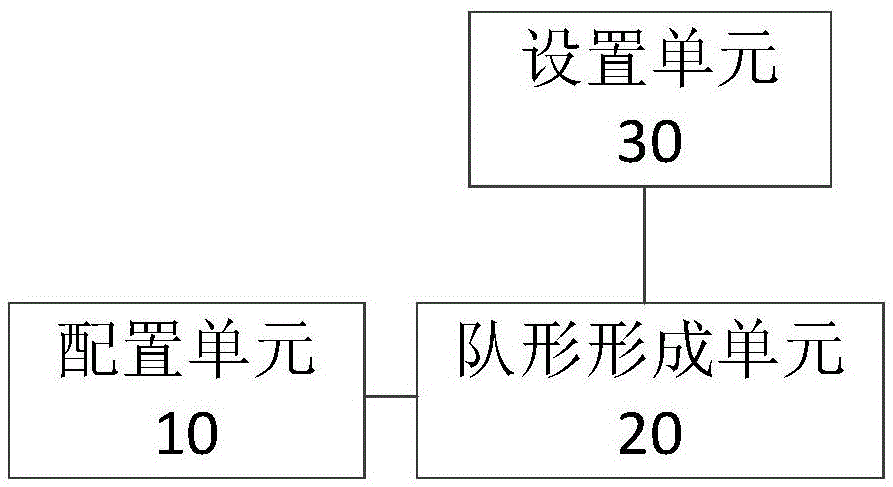
Method and device for formation aiming at multiple intelligent agents
An intelligent body, relative position technology, applied in the direction of position/direction control, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as formation disorder
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
[0034] Before introducing the formation method for multiple agents provided by the present invention, first introduce the concepts, definitions and lemmas related to the present invention.
[0035] In formation research based on graph theory, undirected graphs are often used to represent multi-agent network topology. An undirected graph G=(v,ε) consists of a non-empty, finite set of nodes v={v 1 ,v 2 ,...v n} and edge sets Composed of nodes representing agents and edges representing undirected communication links between two agents. Let I={1,2,...,n} represent the label set of nodes in the graph, A=[a ij ] is the weight adjacency matrix in the undirected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More