

Mean-value coupling error-based sliding-mode synchronous control method of self-adaptive rapid terminal of multi-motor system
A technology of coupling error and terminal sliding mode, which is applied in the direction of AC motor control, multiple motor speed adjustment, control system, etc., can solve the problem that tracking performance and synchronization performance cannot be taken into account
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0097] The present invention will be further described below in conjunction with the accompanying drawings.
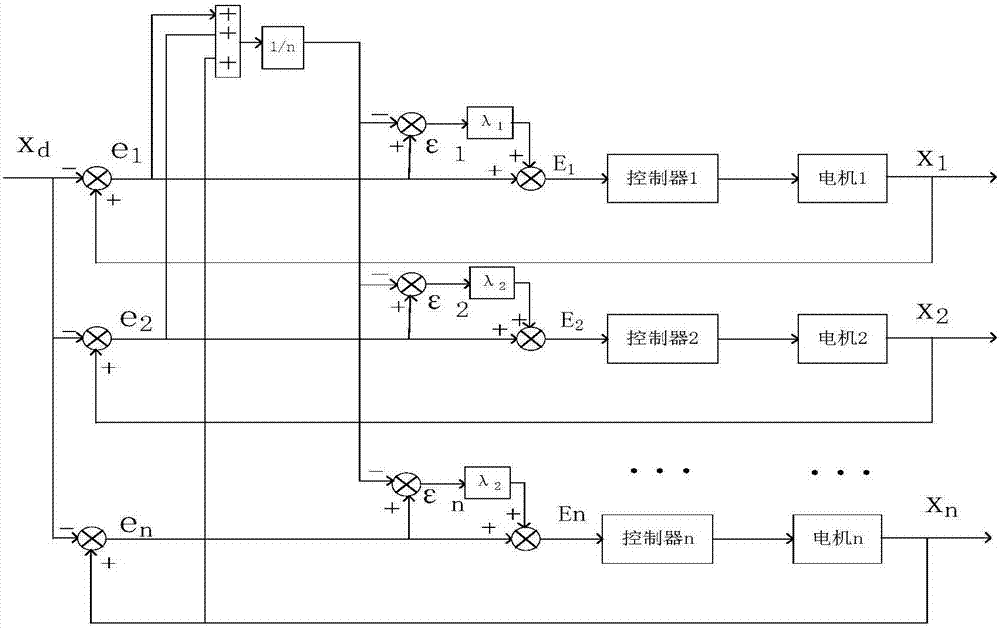
[0098] refer to Figure 1-Figure 4 , an adaptive fast terminal sliding mode synchronization control method for multi-motor systems based on mean coupling error, comprising the following steps:
[0099] Step 1, establish a dynamic model of the multi-motor system, initialize the system state, sampling time and control parameters;
[0100] A multi-motor system consisting of n motors, its dynamic model is described as
[0101]
[0102] define diag[g 1 , g 2 ,..., g n ] is a diagonal matrix of order n, g 1 , g 2 ,..., g n is a diagonal element, then J=diag[J in formula (1) 1 ,J 2 ,...,J n ] means moment of inertia, x=[x 1 ,x 2 ,...,x n ] T Indicates the position, then Indicate acceleration and velocity respectively, b=diag[b 1 ,b 2 ,...,b n ] means viscous friction coefficient, k=diag[k 1 ,k 2 ,...,k n ] means control gain, u=[u 1 ,u 2 ,...,u n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More