

Vision and ranging fusion-based food delivery robot indoor positioning system and positioning method
A food delivery robot and indoor positioning technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of high-precision IMU system complexity, decreased accuracy, poor flexibility, etc., and achieve the advantages of increased deployment speed, reduced cost, and low cost Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
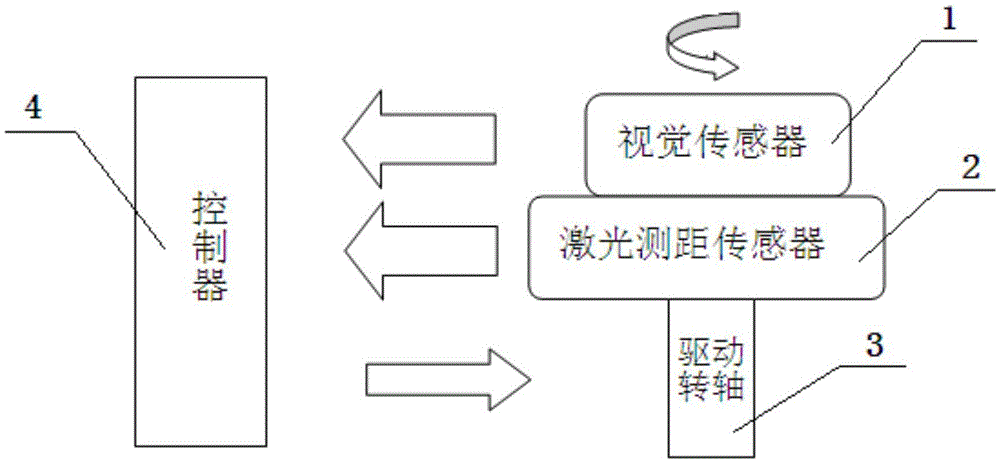
[0026] An indoor positioning system and positioning method for a food delivery robot that integrates vision and ranging, such as figure 1 Shown, comprise visual sensor 1, laser ranging sensor 2, driving shaft 3, controller 4, the input end of described visual sensor 1 and laser ranging sensor 2 are all connected with the output end of driving shaft 3, visual sensor 1 and The output end of the laser ranging sensor 2 is connected to the controller 4; the output end of the controller 4 is connected to the input end of the drive shaft 3, and the controller 4 is provided with a signal processing unit and a storage unit.
[0027] The driving rotating shaft 3 drives the visual sensor 1 and the laser distance measuring sensor 2 which can be rotated for scanning. Vision sensor 1 is responsible for collecting images during scanning, and laser ranging sensor 2 is responsible for measuring the distance between the robot and obstacles during scanning. The visual sensor 1 obtains an image ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More