

Multi-sensor fusion-based indoor positioning method and system thereof
A multi-sensor fusion and indoor positioning technology, which is applied in radio wave measurement systems, instruments, electromagnetic wave re-radiation, etc., can solve problems such as acquisition, lidar matching errors, and loss of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
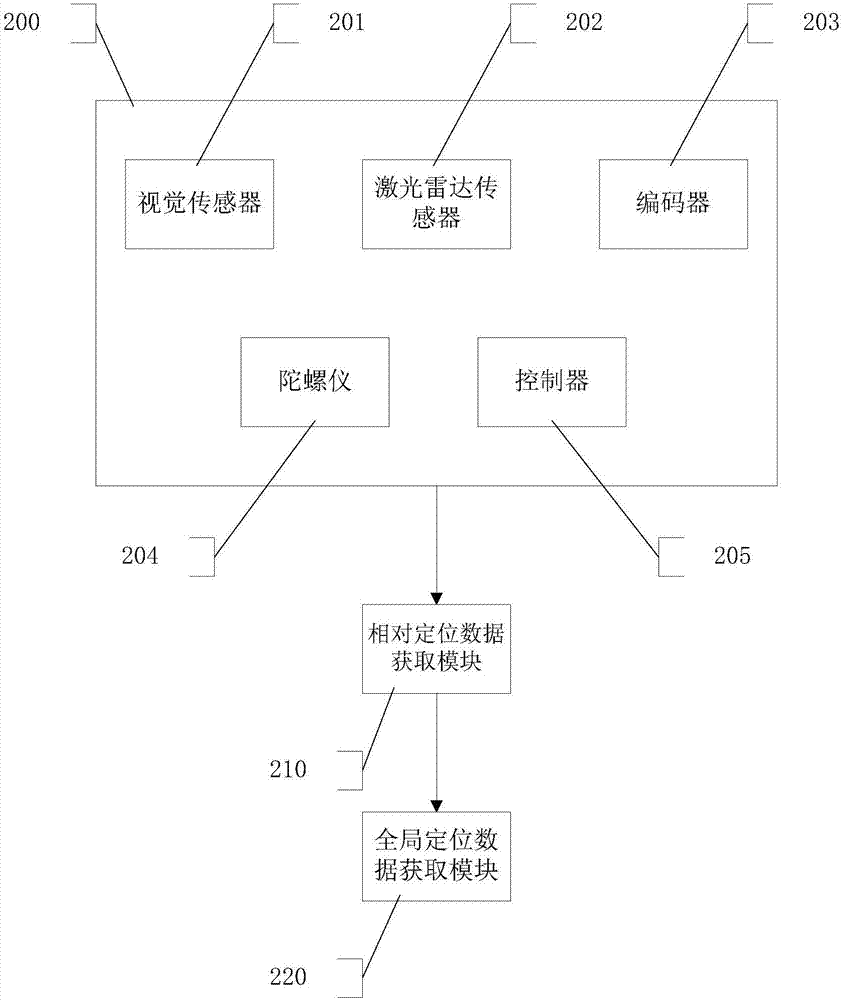
[0074] Map creation module 200 , visual sensor 201 , lidar sensor 202 , encoder 203 , gyroscope 204 , controller 205 , relative positioning data acquisition module 210 , and global positioning data acquisition module 220 .
[0075] Such as figure 2 As shown, the multi-sensor fusion unmanned ferry vehicle indoor positioning system, its structural composition includes: vision sensor, lidar sensor, encoder, gyroscope, controller, and the vision sensor and lidar sensor are external sensors, and the main The control connection, the encoder and the gyroscope are internal sensors, which are connected to the driver.
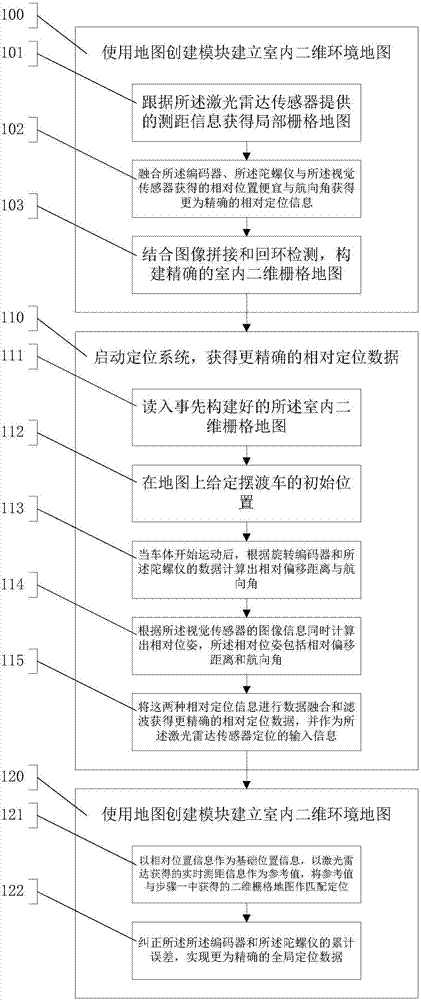
[0076] Such as figure 1 As shown, step 100 is executed to create an indoor two-dimensional environment map using the map creation module 200 . In step 100, step 101 is executed to obtain a local grid map according to the ranging information provided by the lidar sensor 202 . Step 102 is executed to fuse the relative position and heading obtained by the encoder 203 , ...
Embodiment 2
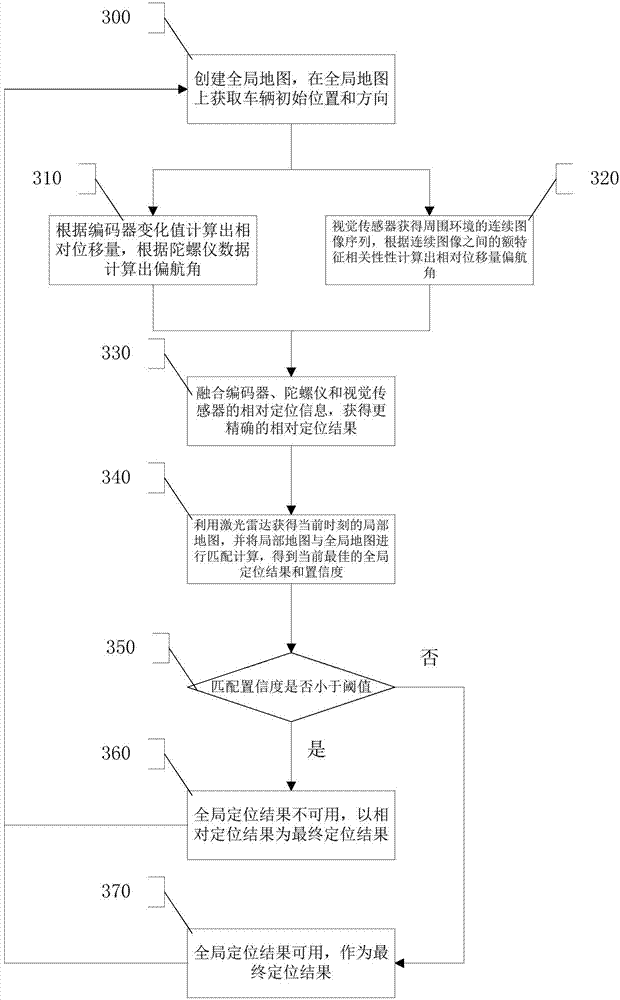
[0096] Such as image 3 As shown, step 300 is executed, using the inertial navigation sensor, vision sensor and lidar sensor, and using SLAM technology to construct an indoor environment map of vehicle movement. The inertial navigation sensors may include but are not limited to encoders, gyroscopes, accelerometers, etc., use gyroscopes to obtain yaw angle information, use encoders to obtain relative distance offset information, and use these sensors to obtain the relative distance of the vehicle from the next moment to the previous one. The pose offset at each moment. Based on the maximum sensing distance and sensing angle, the lidar sensor can generate a local map with the lidar sensor as the origin, combine positioning information with map construction and loop detection, and finally generate a global map. Step 310 and step 320 are executed respectively to calculate the relative displacement and yaw angle. In step 310, the inertial sensor is used to obtain the angle change...
Embodiment 3
[0099] According to the performance of the lidar sensor and the application environment, a single or multiple lidar sensors can be used. Such as Figure 4 As shown, the number 400 is the vehicle body, the number 410 is the lidar sensor 1, the number 420 is the coverage area of the lidar sensor 1, the number 430 is the lidar sensor 2, and the number 440 is the coverage of the lidar sensor 2 area. Two laser radar sensors 410 and 430 are installed in front of the vehicle body 400, and considering the signal source interference problem when the signal sources of the two laser radar sensors are relatively close, their observation ranges are set to 90° and 270° respectively, so that Except for a small area directly behind the car body, the surrounding 360° distance information can be observed.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More