

A special motion controller for four-cable traction camera robot
A four-cable traction camera and motion controller technology, applied in computer control, general control system, program control, etc., can solve the problems of poor coordination, high cost, poor precision, etc., achieve good consistency and scalability, and improve Throughput rate and reliability, good effect of movement coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in combination with specific examples and with reference to the accompanying drawings. It should be understood that these descriptions are exemplary only, and are not intended to limit the scope of the present invention. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concept of the present invention.
[0026] Below in conjunction with accompanying drawing and embodiment the present invention is further described:
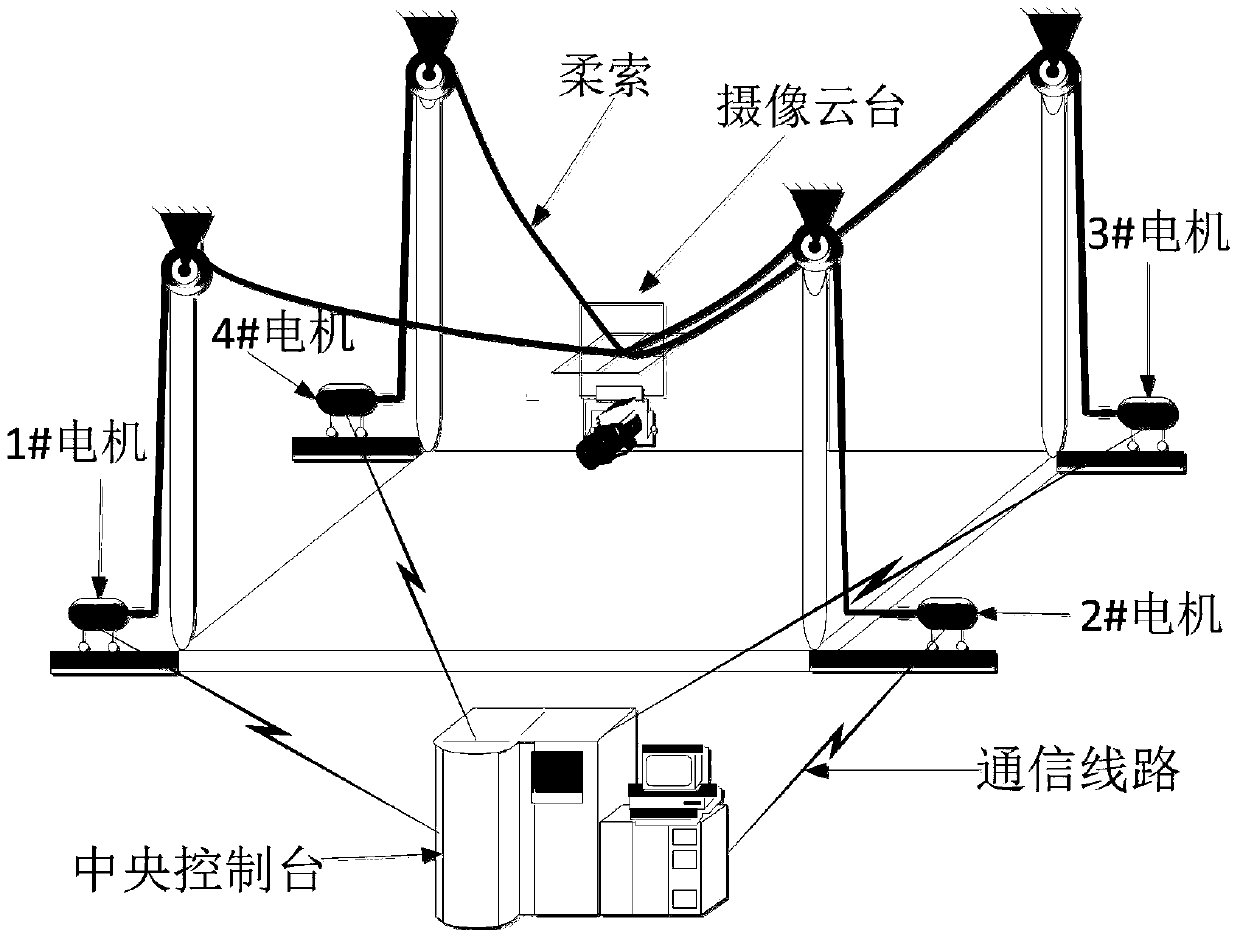
[0027] The four-cable traction camera robot is a three-degree-of-freedom redundant parallel mechanism, which is realized by using four servo motors to drive the reels to retract and unwind the flexible cables. The system architecture is as follows: figure 1 shown. The present invention realizes the precise mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More