

Separating type robot dragging and demonstrating handle and demonstrating method thereof
A technology of dragging and teaching, robot, applied in the direction of manipulator, program control manipulator, manufacturing tool, etc., can solve the problems of high cost of force/torque sensor, poor teaching effect, small movable space of handle, etc. Large, intuitive operation process, the effect of reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
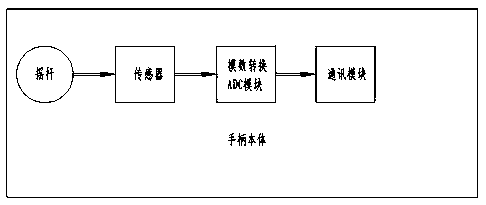
[0016] Example 1: Reference figure 1 . The separate robot drags the teaching handle, which is a six-degree-of-freedom handle, including a handle body. A sensor that converts the action into an analog electrical signal, the output end of the sensor is connected with an analog-to-digital conversion ADC module that converts the analog electrical signal into a digital signal, and the output end of the analog-to-digital conversion ADC module is connected with a handle and Communication module for data exchange between host computers.
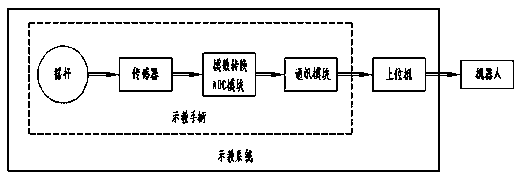
[0017] Such as figure 2 As shown, the separate robot dragging and teaching system includes a six-degree-of-freedom handle body, and the handle body is provided with a rocker for inputting the desired movement trajectory of the teaching operator, and the output end of the rocker is connected to a mechanical A sensor that converts the action into an analog electrical signal, the output end of the sensor is connected with an analog-to-digital conver...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More