A motion control method and system for a manipulator with a link structure
A connecting rod structure and motion control technology, applied in the field of manipulators, can solve problems such as low efficiency, achieve the effect of improving smoothness and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
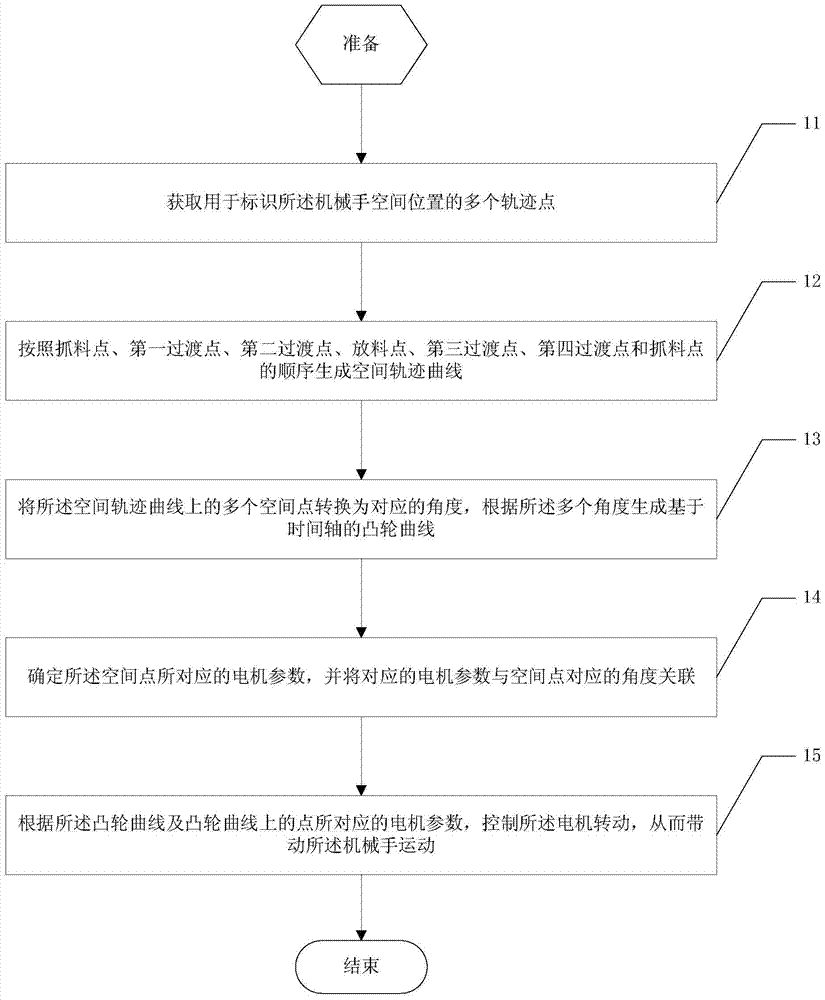
[0034] Such as figure 1 Shown is the working flow chart of the motion control method of a kind of link structure manipulator of the present invention, comprises:
[0035] Step 11, obtaining a plurality of trajectory points for identifying the spatial position of the manipulator, the trajectory points including a grabbing point for identifying a grabbing position, a discharging point for identifying a discharging position, and the grabbing point point and the transition point between the discharge point, the transition point includes the first transition point, the second transition point, the third transition point and the fourth transition point, the spatial position is the horizontal position and vertical position of the manipulator Location;
[0036] Step 12, generating a space trajectory curve in the order of the grabbing point,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More