

Simple three-DOF (degree of freedom) small-inertia bionic leg driven by hydraulic motors and applied to armed robot
A hydraulic motor and robot technology, applied in the field of armed robots, can solve the problems of large moment of inertia, low power density, and unstable joint output torque, and achieve the effects of high power density, reducing the number of parts, and increasing strength
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
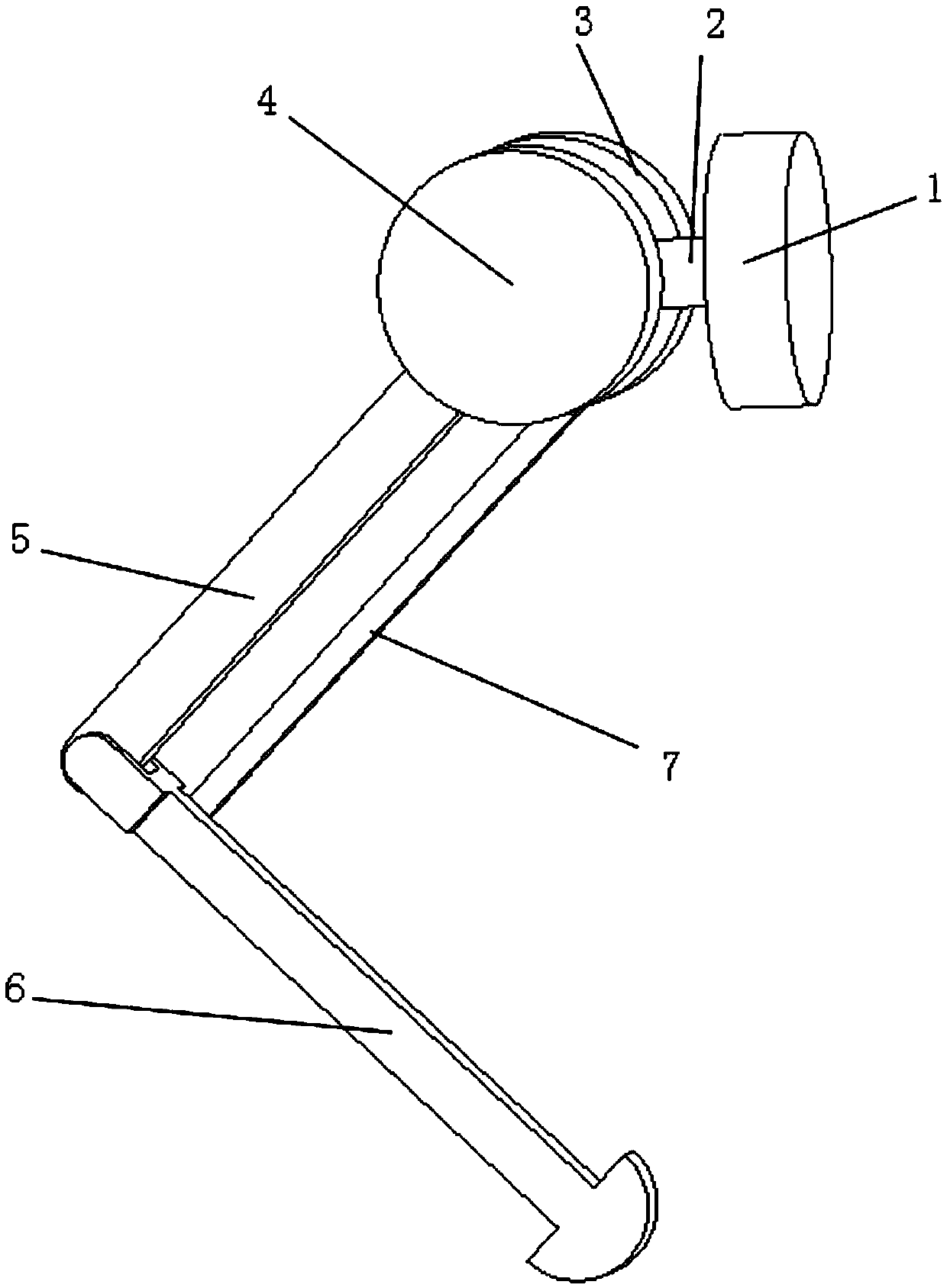
[0031] This embodiment provides a simple three-degree-of-freedom small-inertia bionic leg driven by a hydraulic motor, which is characterized in that it includes three hydraulic motors, a bionic leg transmission mechanism, hips, thighs and calves, and two directions of rotation of the hip joint Movement is directly driven by two hydraulic motors, and the knee joint is driven by a third hydraulic motor through a linkage.
[0032] The three hydraulic motors respectively control the X-direction of the hip joint, the Y-direction of the hip joint and the knee joint, and are respectively called the X-direction hydraulic motor of the hip joint, the Y-direction hydraulic motor of the hip joint and the hydraulic motor of the knee joint.
[0033] The X-direction hydraulic motor of the hip joint is fixed on the fuselage and connected to the hip, and when the X-direction hydraulic motor of the hip joint moves, it drives the whole leg to rotate in the X direction.
[0034] The Y-direction ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More