

Snake imitation search and rescue robot multi-gait control method
A gait control and robot technology, applied in the field of bionic robots, can solve problems such as difficult to popularize and apply, non-snake motion patterns that do not consider fast movement ability, and inability to effectively expand various control signals, etc. The design process is clear and simple
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to better understand the technical solution of the present invention, a snake-like search and rescue robot with orthogonal driving wheels and bionic parallel joints is taken as the research object to further introduce the embodiment of the present invention.
[0028] 1.1 Construct the natural gait, wheeled gait and chaotic gait of the snake-like search and rescue robot based on the requirements of completing tasks efficiently.
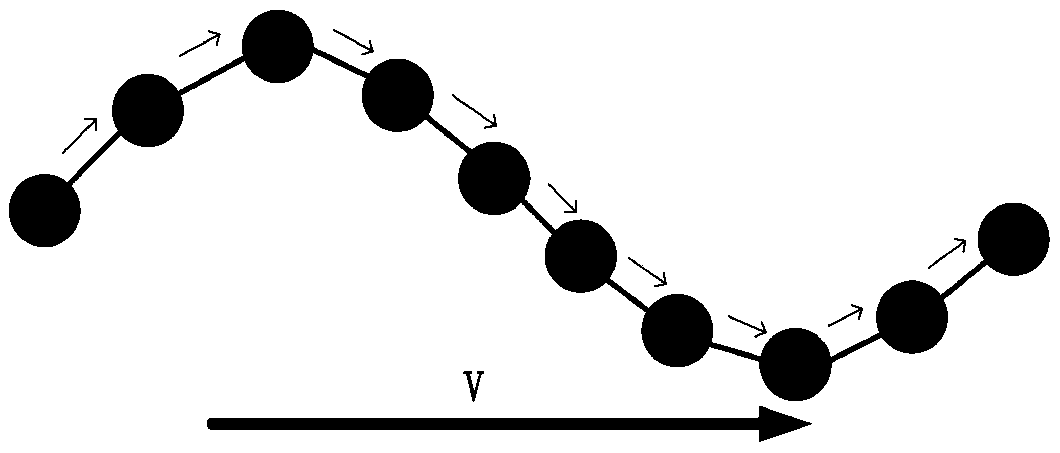
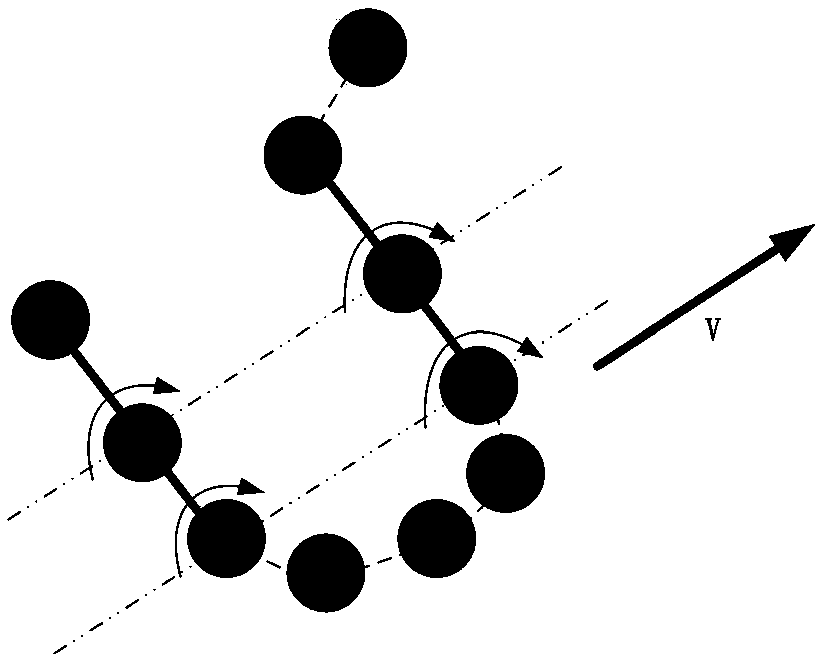
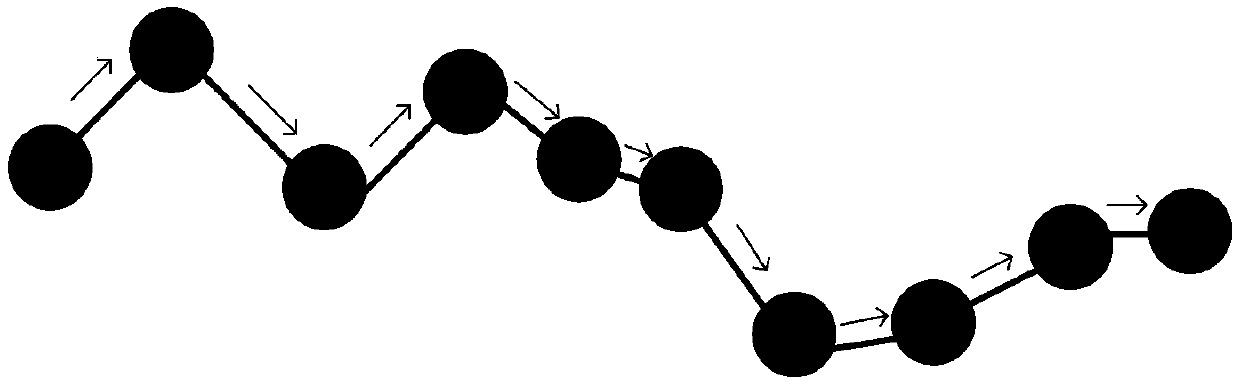
[0029] According to the characteristics of most disaster sites covered with more or less, large or small obstacles, in order to enable the snake-like search and rescue robot to achieve fast movement on relatively flat terrain, and to perform snake-like movement on uneven ground to protect the snake body mechanism, the Random movement requirements in a small space, that is, the snake-like search and rescue robot needs three types of movement modes: natural, wheeled and chaotic, so as to complete tasks efficiently.
[0030] like figure 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More