

Cam rope drive robotic fishtail swing device with shaft replacement door type mechanism
A technology of swing device and cam rope, which is applied to non-rotating propulsion elements and other directions, can solve the problems such as the difficulty in controlling the irregular speed change of the motor, increase power consumption and control difficulty, and achieve the solution of limited space at the end of the movement and limited load, control The effect of problem simplification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The present invention will be further described in detail below in conjunction with the accompanying drawings.
[0080] Rope Driven Robotic Fishtail Swing Device with Single Door and Single Cam
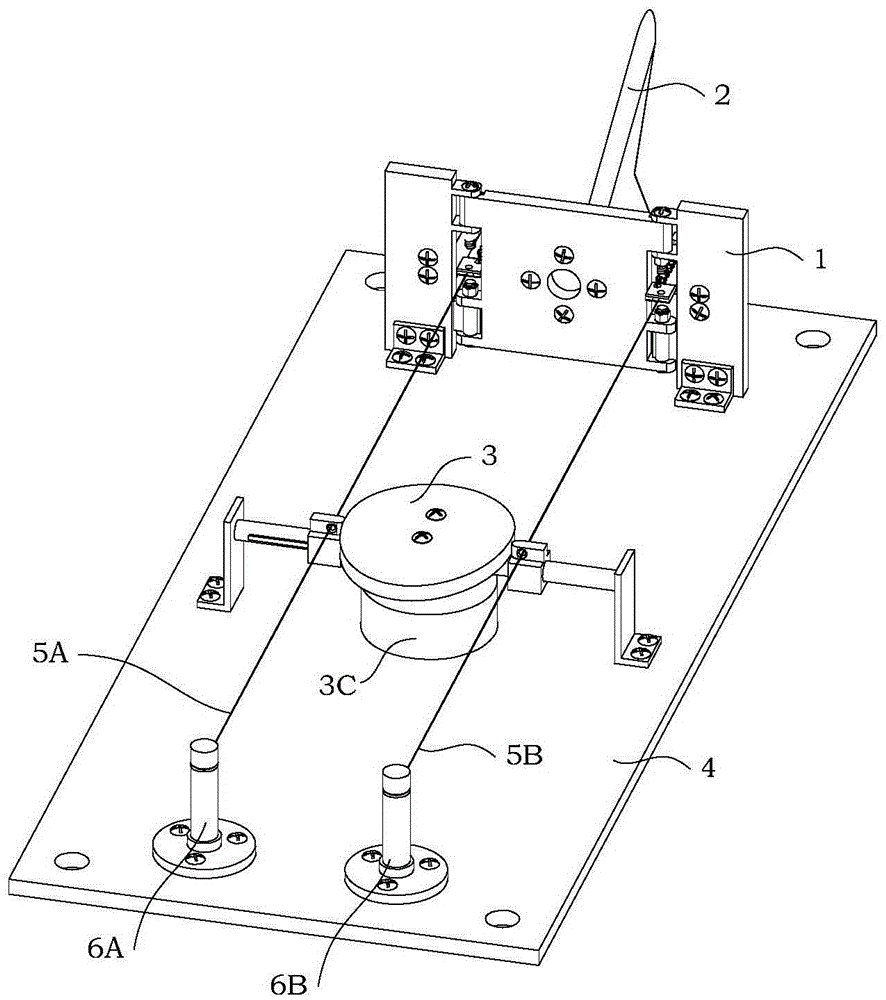
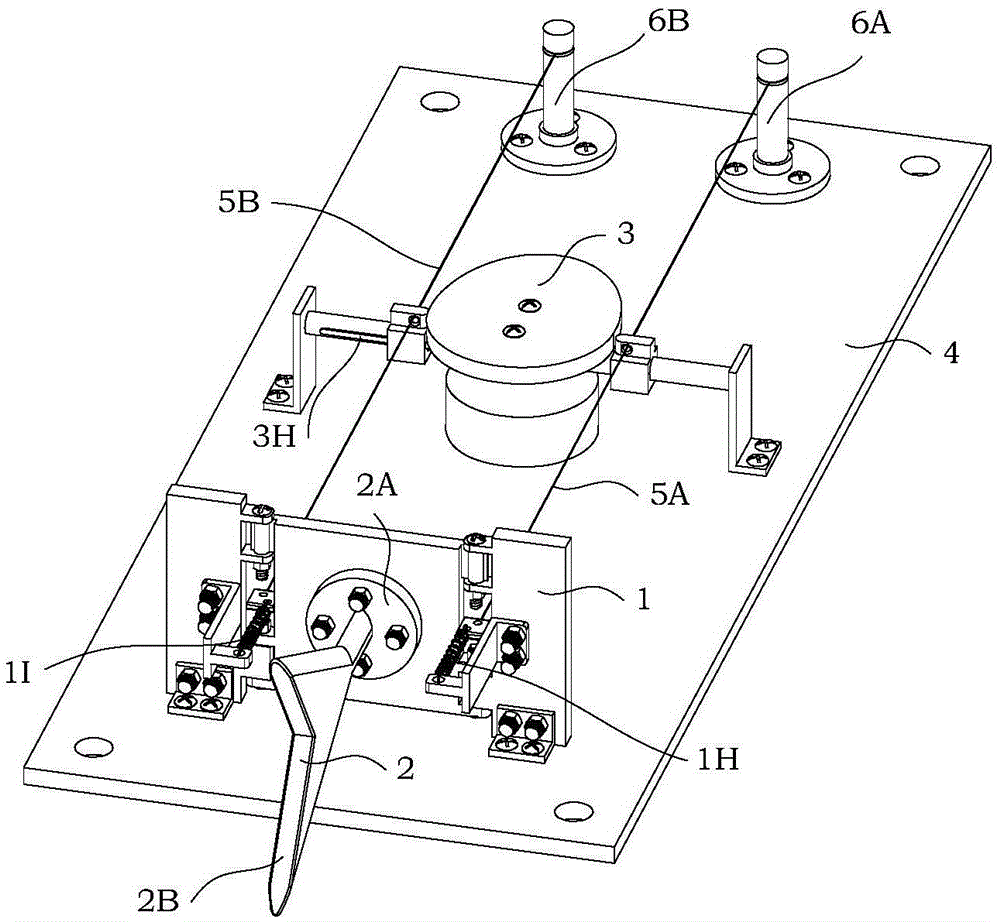
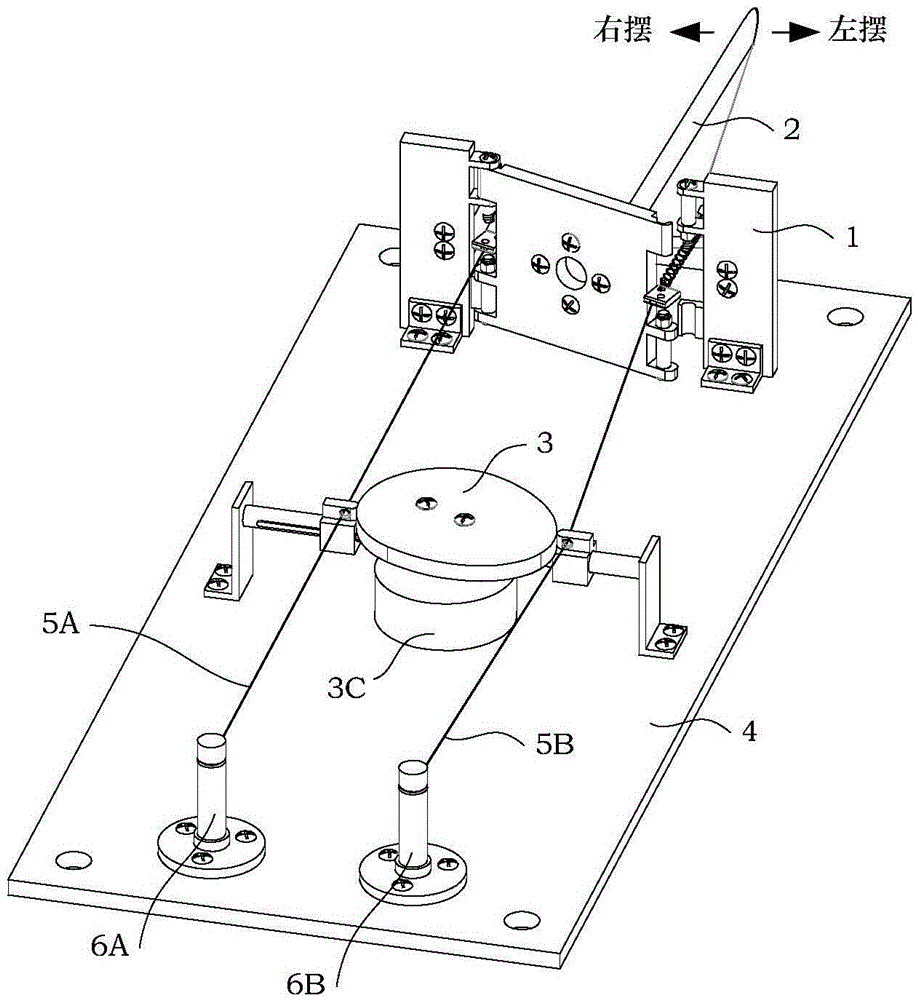
[0081] see figure 1 , Figure 1A , Figure 1B , Figure 1C , Figure 1D As shown, a kind of cam rope-driven machine fishtail swinging device (also can be called single-door single-cam rope-driven machine fishtail swinging device) with shaft-changing door-type mechanism designed by the present invention, the single-door single-cam rope The drive machine fishtail swinging device includes a replaceable shaft door mechanism 1, a machine fishtail 2, a disc cam drive mechanism 3, a base 4, A stay cord 5A, B stay cord 5B, A column 6A and B column 6B. The base 4 is provided with a mounting hole for mounting a limit. Such as the mounting holes for fixedly installing the A column 6A and the B column 6B. Such as the mounting holes for fixedly installing the A bracket 3I and the B b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More