

Multi-rising-and-landing-point course planning method used for cruising power of unmanned aircraft
A technology of unmanned aerial vehicles and capabilities, applied in the field of surveying and mapping remote sensing, can solve the problems of short operation routes, no consideration, no estimation of cooperative operation of unmanned aerial vehicles, etc., and achieve the effect of reducing flight distance and improving operation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Specific embodiments of the present invention will be further described in detail below.
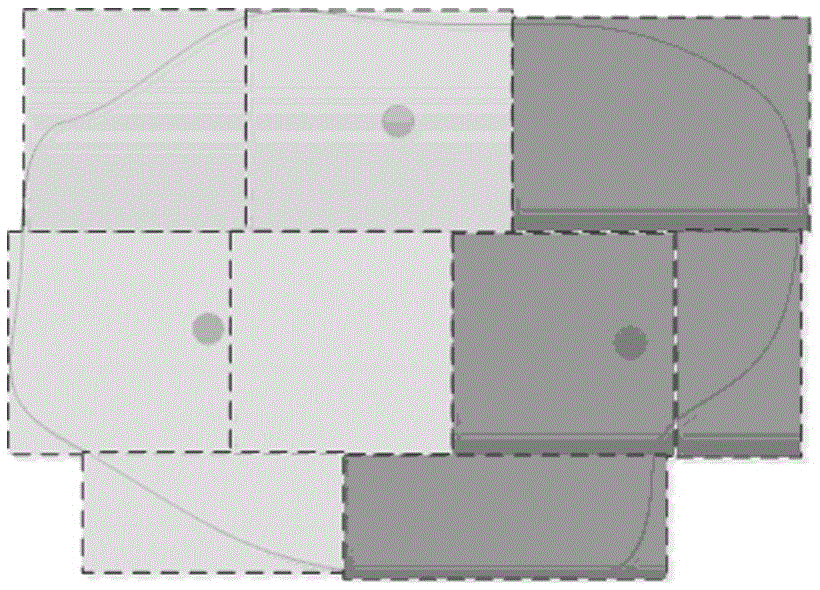
[0027] Such as figure 1 with figure 2 As shown, a multi-take-off and landing point route planning method for unmanned aerial vehicle endurance of the present invention is characterized in that the method uses the take-off and landing point of the unmanned aerial vehicle as a parameter for track planning, and according to The limitation of the single flight operation capability of the UAV, combined with the distribution of take-off and landing points, divides a survey area; it includes the following steps:
[0028] (1) The user draws the flight boundary of the survey area on the map, and the user sets the take-off and landing points on the map according to the convenience of the on-site flight operation and the visibility conditions;
[0029] (2) Calculate the flight altitude to be flown through the image resolution and other parameters specified by the user, combined with the o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More