

Method for determining a current position of a motor vehicle in a geodetic coordinate system and motor vehicle
A geodetic coordinate system and actual position technology, applied in satellite radio beacon positioning system, measurement device, radio wave measurement system, etc., can solve the problems of laborious compensation and waiting time, and achieve the effect of great stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
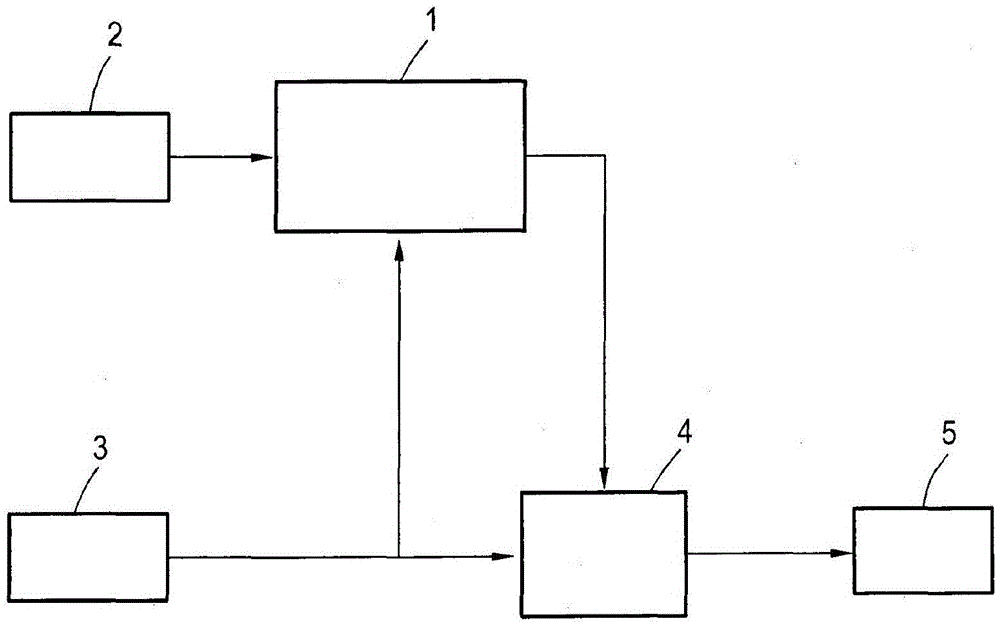
[0027] figure 1 An overview diagram for carrying out the method according to the invention is shown. The method is finally carried out on two different time scales, recalculating the transformation parameters every 5 seconds from the position data 2 and the own movement data 3 in step 1, and at the same time significantly more frequently from the reference time point in step 4 For example, the transformation is applied to the actual, significantly more frequently occurring displacement vectors at a frequency of greater than 10 Hz. In short: the method first obtains the transformation relative to the reference time point in step 1 and the displacement vector describing the position change since the reference time point, and then transforms the displacement vector into the global geodetic coordinate system in step 4 , so that a highly accurate and actual position 5 can be obtained in exchange. The above method will be explained in more detail below.
[0028] In step 1, a pres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More