

Industrial robot Cartesian space trajectory geometric smoothing method
An industrial robot and Cartesian space technology, applied in two-dimensional position/channel control and other directions, can solve problems such as sudden changes in curvature and acceleration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
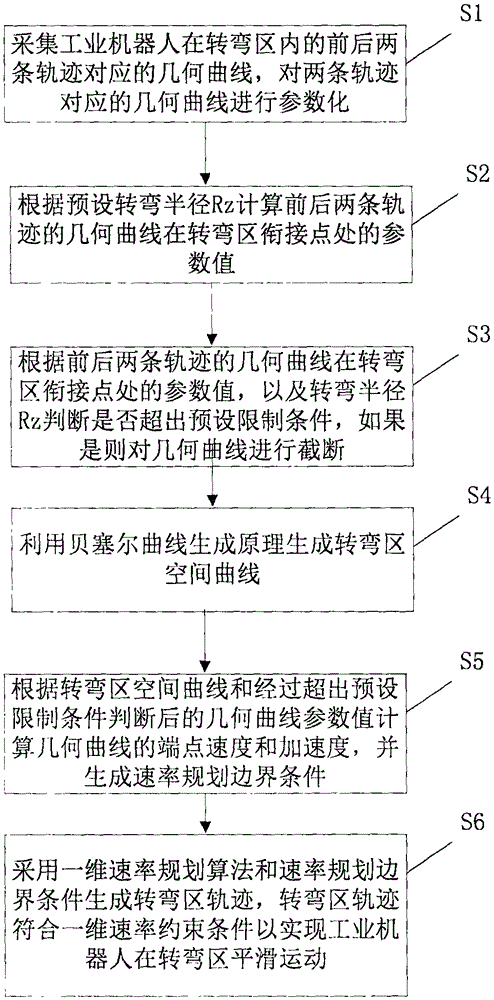
[0056] Such as figure 1 As shown, the geometric smoothing method for the Cartesian space trajectory of an industrial robot in the embodiment of the present invention includes the following steps:
[0057] Step S1, collect the geometric curves corresponding to the two trajectories before and after the industrial robot in the turning area, and parameterize the geometric curves corresponding to the two trajectories, including: parameterizing the length of the straight line in space and the arc length in space in the geometric curve ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More