

Method for executing an evasive maneuver, computer program product and motor vehicle
A technology for vehicles and actions, applied in the field of avoidance actions, equipment, computer program products and vehicles, which can solve problems such as loss and achieve the effect of simplifying calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
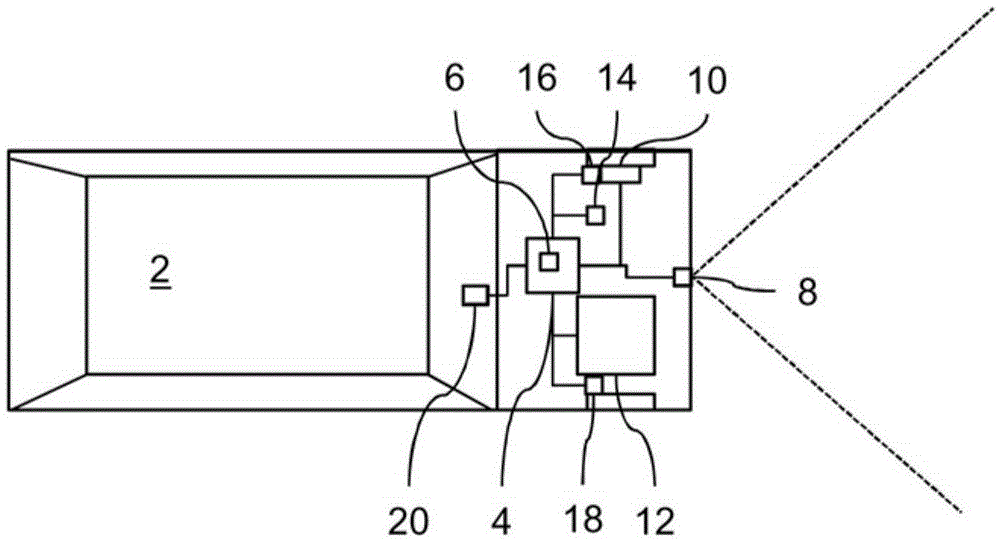
[0042] figure 1 Car 2 is shown.
[0043] Motor vehicle 2 is configured to carry out an automatic evasive maneuver by means of controller 4 . combine Figure 4 A method for implementing evasive maneuvers is described in more detail. The evasive maneuver is carried out in such a way that under normal road conditions the optimal evasive maneuver is carried out, whereas under unfavorable road conditions the evasive maneuver can be quickly corrected according to the road conditions. Motor vehicle 2 has a controller 4 for carrying out evasive maneuvers. The control unit 4 can also have other functions, such as stability program functions and other aspects of driving dynamics, such as a quick-start program and the like for acceleration with maximum acceleration force.
[0044] The controller 4 has a memory 6 in which, on the one hand, a computer program product is stored which, once executed by the controller 4 , causes an evasive action to be carried out.
[0045] Furthermore, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More