

Full-automatic harvesting device with environment perception capability
A technology for environmental perception and harvesting device, applied in harvesters, measuring devices, cutters, etc., can solve problems such as poor real-time performance, low calculation accuracy, and insufficient perception dimensions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
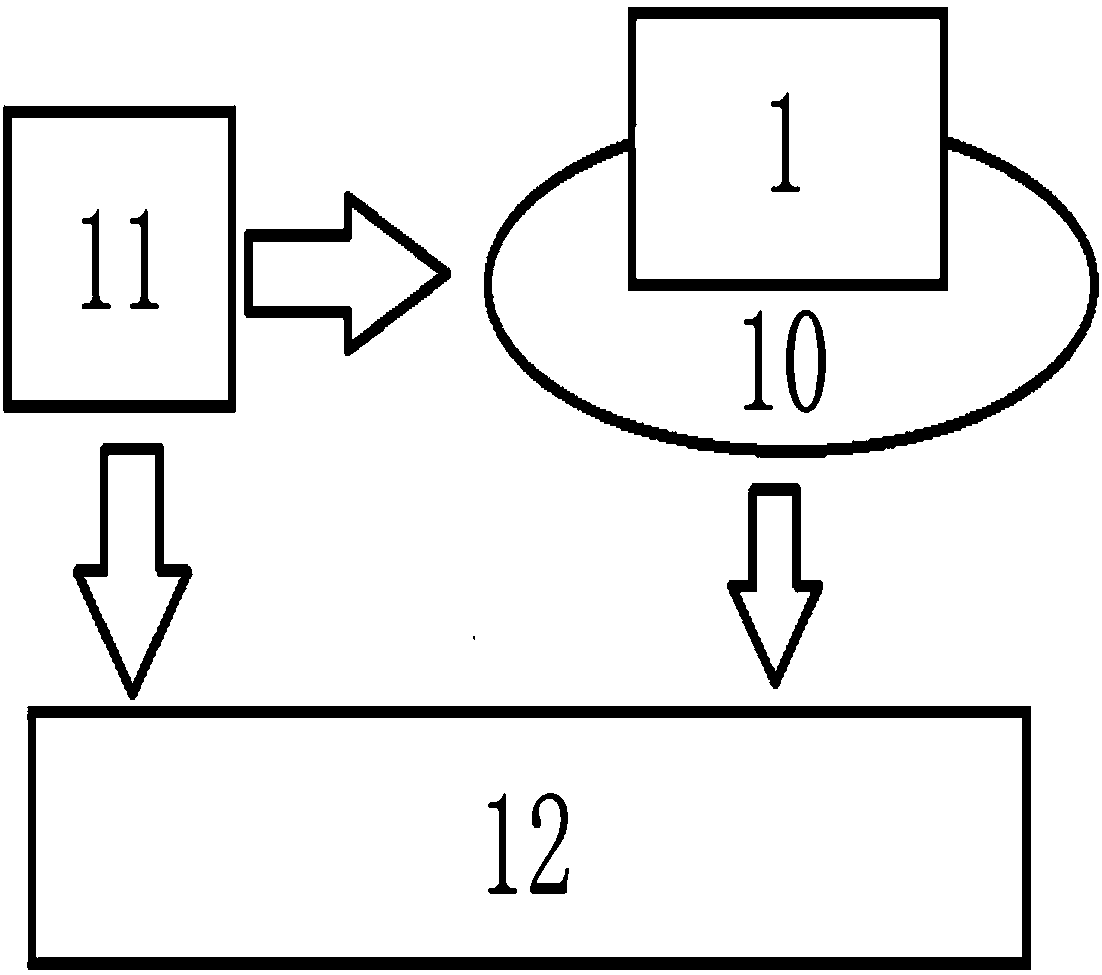
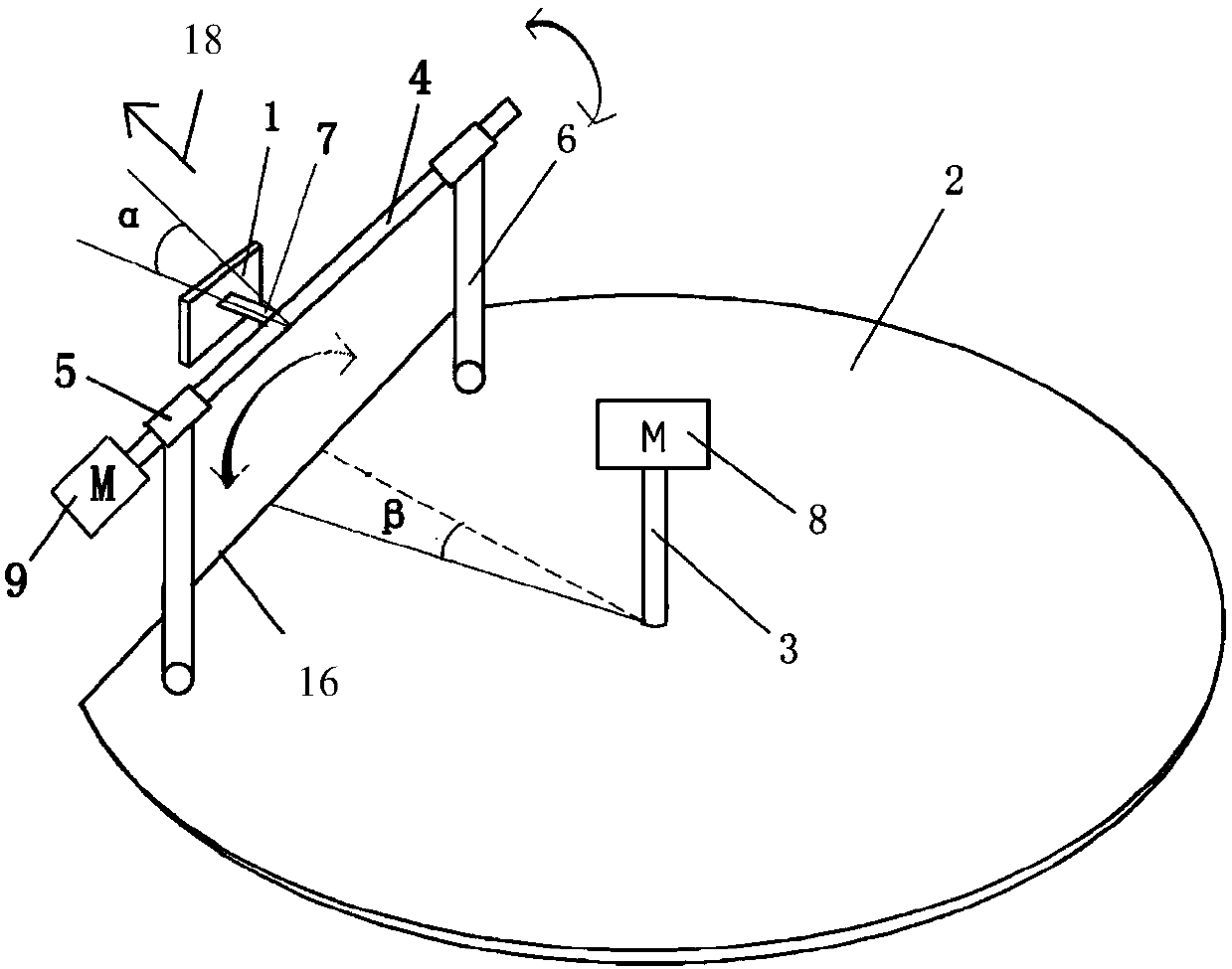
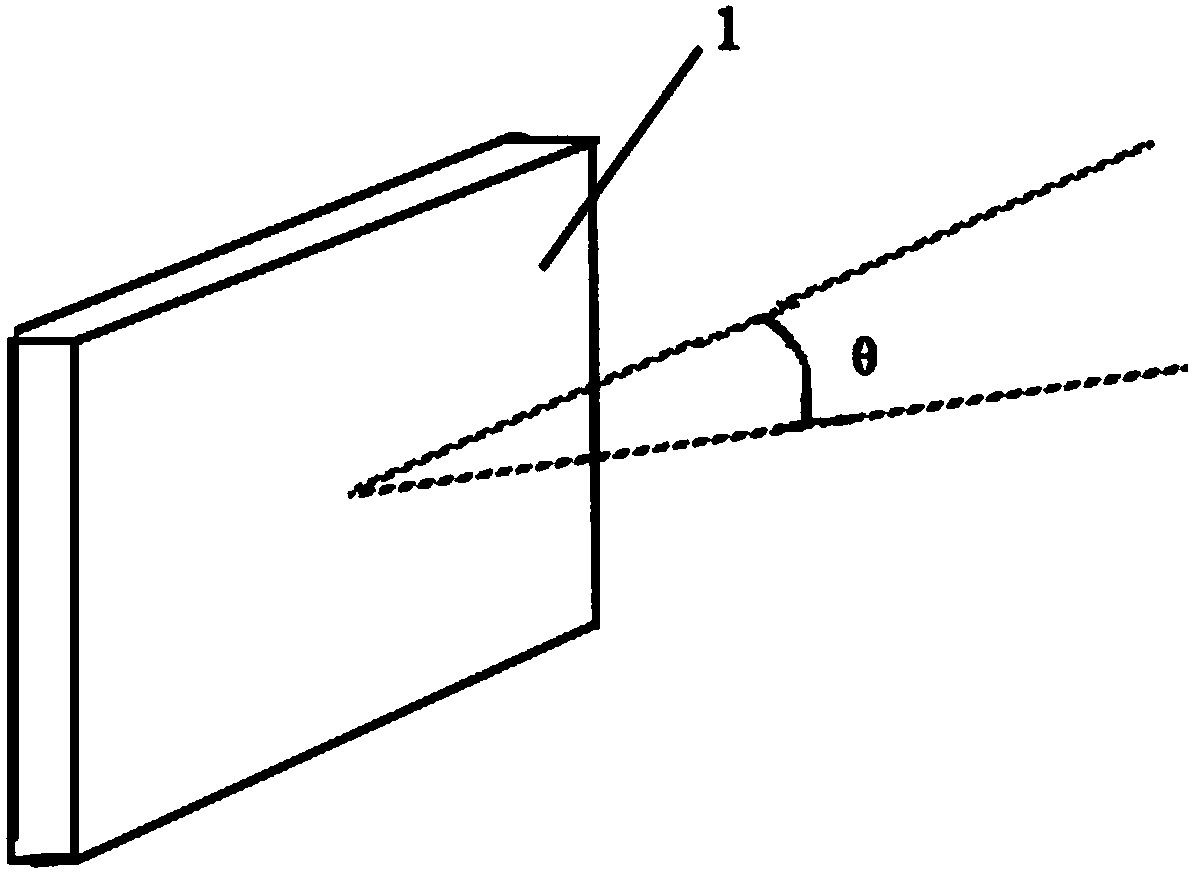
[0033] Such as Figure 1-4A fully automatic harvesting device with environmental perception capability shown includes a harvester and a millimeter-wave radar three-dimensional environment perception system installed on the harvester; the millimeter-wave radar three-dimensional environment perception system includes a millimeter-wave radar 1, a rotating mechanical device 10, The control unit 11 and the data processing unit 12; the rotating mechanical device includes a first rotating shaft 3, a rotating disk 2 and a second rotating shaft 4, the first rotating shaft 3 is vertically arranged and fixed to the center of the rotating disk 2, so The first rotating shaft 3 is driven to rotate by the first stepping motor 8; the second rotating shaft 4 driven to rotate by the second stepping motor 9 is horizontally sleeved in the bearing seat 5, and the bearing seat 5 is arranged vertically through two The supporting shaft 6 is fixed on the rotating disk 2; the midpoint of the second rot...
Embodiment 2
[0051] Such as Figure 1-4A fully automatic harvesting device with environmental perception capability shown includes a harvester and a millimeter-wave radar three-dimensional environment perception system installed on the harvester; the millimeter-wave radar three-dimensional environment perception system includes a millimeter-wave radar 1, a rotating mechanical device 10, The control unit 11 and the data processing unit 12; the rotating mechanical device includes a first rotating shaft 3, a rotating disk 2 and a second rotating shaft 4, the first rotating shaft 3 is vertically arranged and fixed to the center of the rotating disk 2, so The first rotating shaft 3 is driven to rotate by the first stepping motor 8; the second rotating shaft 4 driven to rotate by the second stepping motor 9 is horizontally sleeved in the bearing seat 5, and the bearing seat 5 is arranged vertically through two The supporting shaft 6 is fixed on the rotating disk 2; the midpoint of the second rot...
Embodiment 3
[0069] Such as Figure 1-4A fully automatic harvesting device with environmental perception capability shown includes a harvester and a millimeter-wave radar three-dimensional environment perception system installed on the harvester; the millimeter-wave radar three-dimensional environment perception system includes a millimeter-wave radar 1, a rotating mechanical device 10, The control unit 11 and the data processing unit 12; the rotating mechanical device includes a first rotating shaft 3, a rotating disk 2 and a second rotating shaft 4, the first rotating shaft 3 is vertically arranged and fixed to the center of the rotating disk 2, so The first rotating shaft 3 is driven to rotate by the first stepping motor 8; the second rotating shaft 4 driven to rotate by the second stepping motor 9 is horizontally sleeved in the bearing seat 5, and the bearing seat 5 is arranged vertically through two The supporting shaft 6 is fixed on the rotating disk 2; the midpoint of the second rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More