

Method and device for detecting lane lines on road surface
A technology of lane line detection and detection method, applied in the field of information detection, can solve the problems of high labor cost, stay, difficult to control accuracy, etc., and achieve the effect of saving labor cost and improving integrity and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
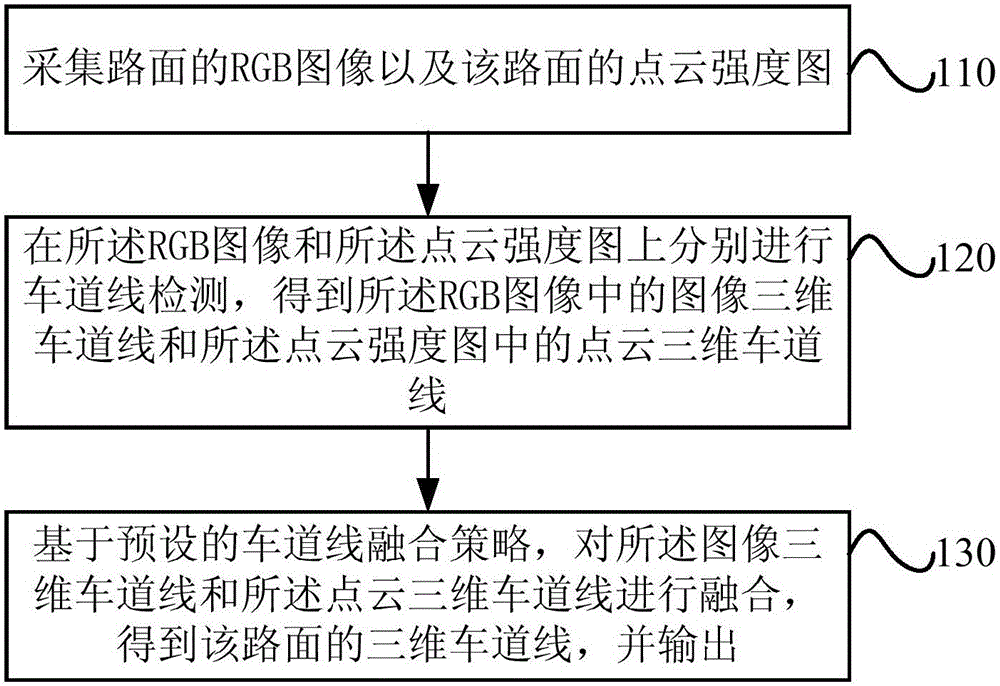
[0029] see Figure 1a , is a flow chart of a method for detecting lane lines on a road provided by Embodiment 1 of the present invention. The method of the embodiment of the present invention can be executed by a detection device configured with hardware and / or software for lane markings on the road surface, and the implementation device is typically configured in a device capable of providing lane marking detection services.
[0030] The method includes:
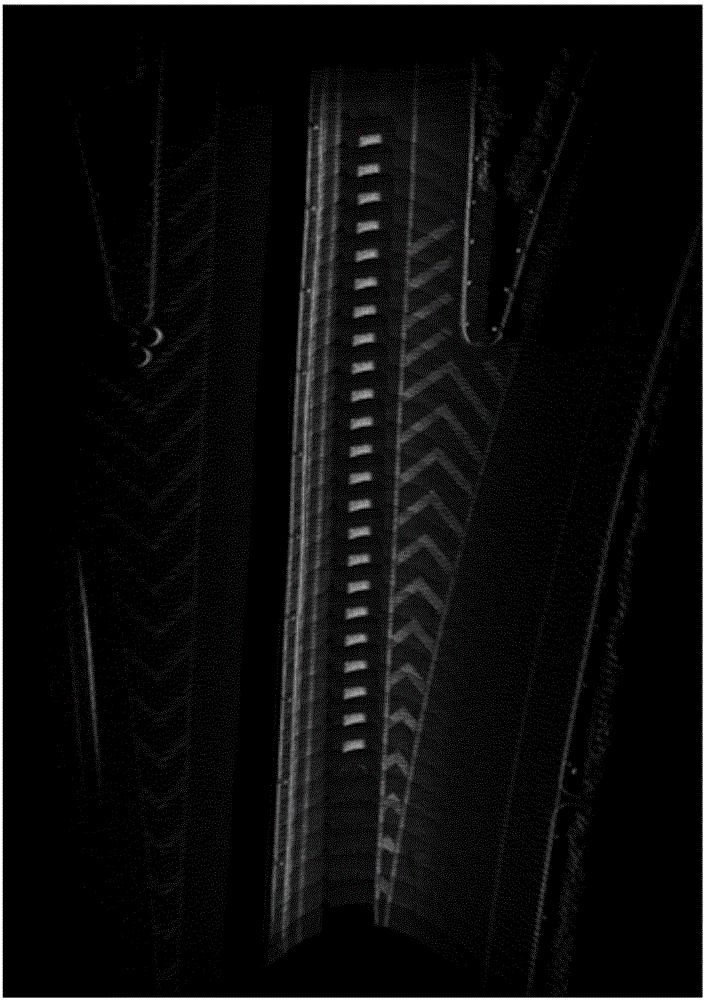
[0031] 110. Collect the RGB image of the road surface and the point cloud intensity map of the road surface.
[0032] In this operation, the RGB image of the road surface and the point cloud intensity map of the road surface are collected synchronously. Specifically, a device for collecting the RGB image (such as an industrial camera) and a device for collecting the point cloud intensity map (such as a radar) may be configured on the collection vehicle to realize synchronous collection.
[0033] The device for collecting ...
Embodiment approach
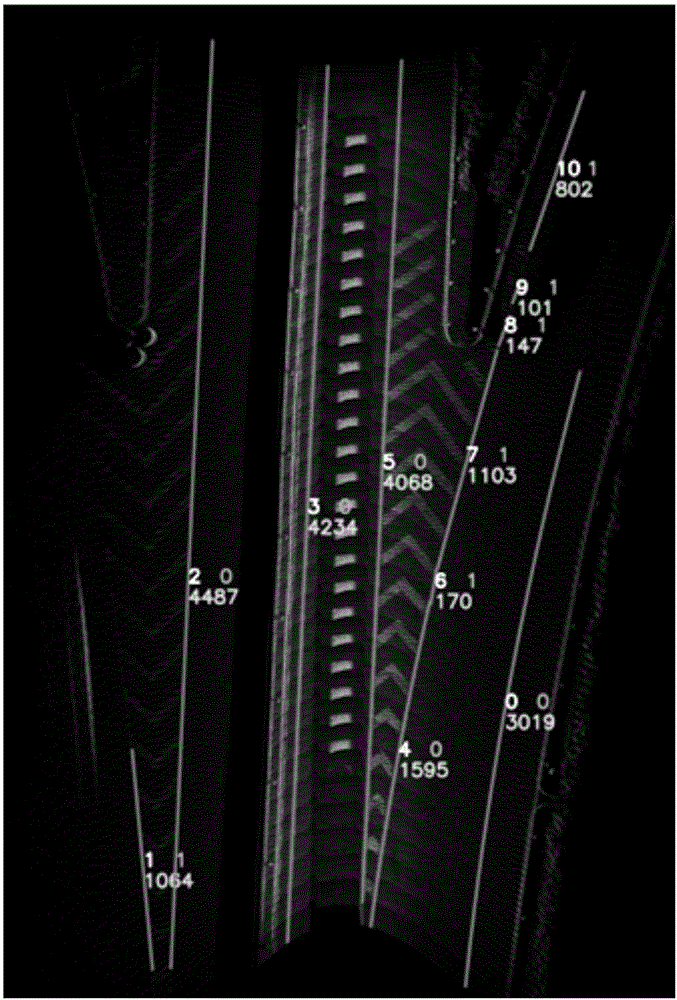
[0036] As an implementation of the operation of performing lane line detection on the RGB image to obtain the image three-dimensional lane line in the RGB image, it may specifically include:
[0037] Using a deep neural network model to perform lane line detection on the RGB image to obtain a two-dimensional lane line in the RGB image;
[0038] Three-dimensional projection is performed on the two-dimensional lane lines in the RGB image to obtain the three-dimensional lane lines in the RGB image as the image three-dimensional lane lines.
[0039] Wherein, the deep neural network model is obtained by learning and training sample RGB images containing marked two-dimensional lane lines.
[0040] Three-dimensional projection refers to, using the internal reference information of the device that collects the RGB image, the acquisition track recorded during the acquisition process of the RGB image and the point cloud intensity map, and the acquisition track recorded during the acquis...
Embodiment 2
[0062] see Figure 2a , is a flow chart of a method for detecting lane lines on a road provided by Embodiment 2 of the present invention. On the basis of the above-mentioned embodiments, this embodiment provides a preset lane line fusion strategy to fuse the three-dimensional lane line of the image and the three-dimensional lane line of the point cloud to obtain the three-dimensional lane line of the road surface, and output The preferred option for this operation.
[0063] The method includes:
[0064] 210. Collect an RGB image of the road surface and a point cloud intensity map of the road surface.
[0065] In this operation, the RGB image of the road surface and the point cloud intensity map of the road surface are collected synchronously. For details, refer to operation 110 in the foregoing embodiment, and details are not repeated here.
[0066] 220. Perform lane line detection on the RGB image and the point cloud intensity map respectively, to obtain image three-dimen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More