Mechanical gripper
A mechanical gripper and finger technology, applied in the field of automation, can solve the problems of limited adjustment range of clamping space, poor versatility and controllability, cumbersome adjustment process, etc., so as to shorten the installation and debugging time, reduce the scrap rate, and improve the general sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
[0035] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
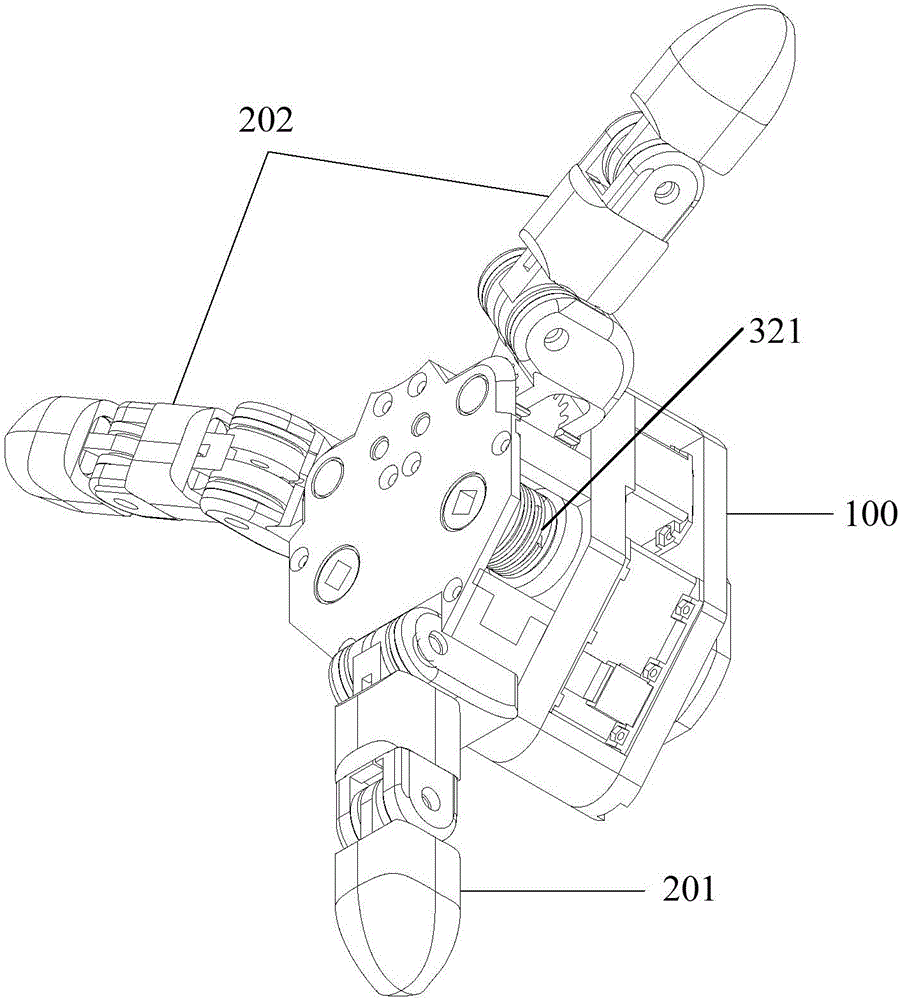
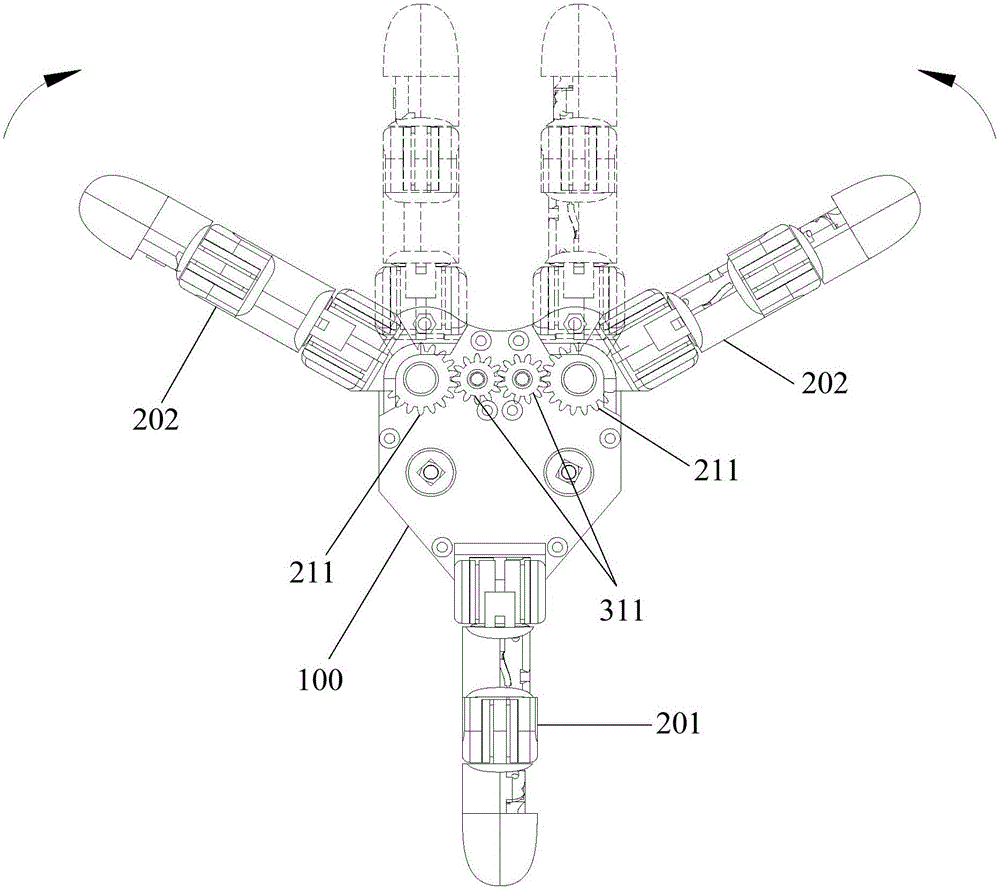
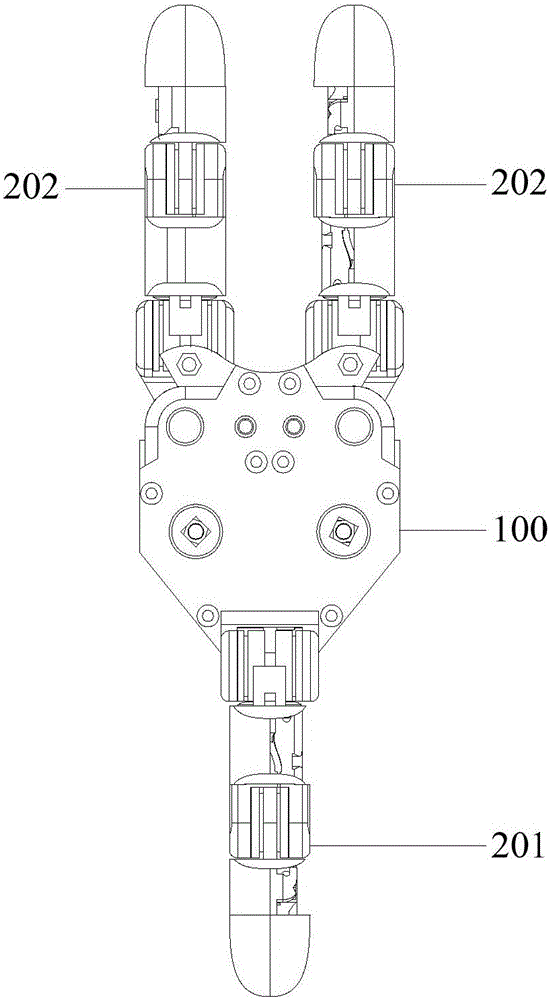
[0036] see Figure 1-Figure 7 , an embodiment of the mechanical gripper of the present invention is proposed, the mechanical gripper includes a base 100, a first drive mechanism installed on the base 100 and three finger assemblies (201, 202) connected to the base 100, the three fingers A clamping space is formed between the components (201, 202), which can clamp workpieces. One finger assembly 201 is fixedly connected to the base 100 , and the other two finger assemblies 202 are movably connected to the base 100 . There is a certain included angle between the three finger assemblies (201, 202), and the first drive mechanism drives the two finger assemblies 202 movably connected to the base 100 to rotate to change the size of the included angle between the three finger assemblies (201, 202). like figure 2 Shown is...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap