

Six-axis mechanical arm
A six-axis manipulator and wrist technology, applied in the field of manipulators, can solve the problems of insufficient firm structure, limited moving range, and insufficient precision, and achieve the effects of simple disassembly and assembly, low maintenance cost, and improved enterprise efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
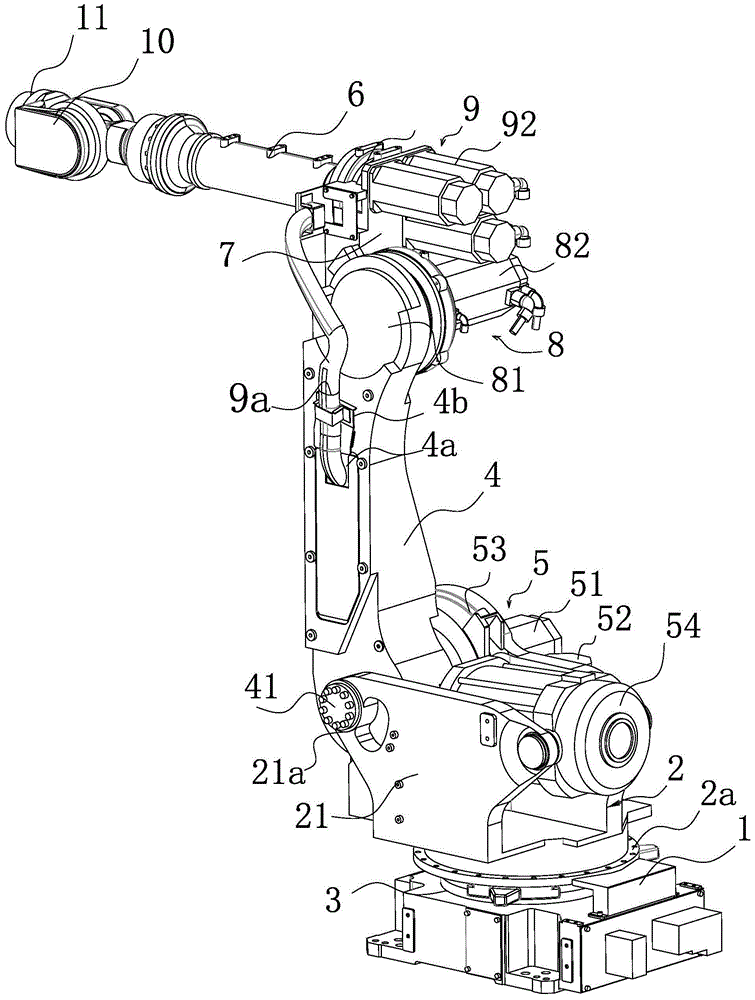
[0014] Such as figure 1 As shown, the six-axis manipulator includes a gear box fixing base 1, on which a driving arm base 2 is arranged, and on the gear box fixing base 1, there is provided a first motor that can drive the driving arm base 2 to rotate in a circumferential direction. Rotary drive 3, the lower end of the driving arm seat 2 is connected to the first rotary drive 3 through the bottom flange 2a, side plates 21 are arranged on both sides of the driving arm seat 2, and a driving arm 4 is provided at one end of the two side plates 21, and the driving arm 4 The two sides of the lower end are respectively provided with first hinge shafts 41, and the first hinge shafts 41 are arranged in the first hinge holes 21a of the side plates 21, and on the outside of one of the side plates 21, there is a drive arm 4 that can drive the drive arm 4 around the first hinge shaft. 41 swinging drive arm drive group 5, the drive arm drive group 5 includes a first drive motor 51 and a sec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More