

Interaction butt-joint control methods adopted when unmanned aerial vehicles enter or exit from relay service stations
A technology of interactive control and control method, applied in the direction of attitude control, non-electric variable control, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0077] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
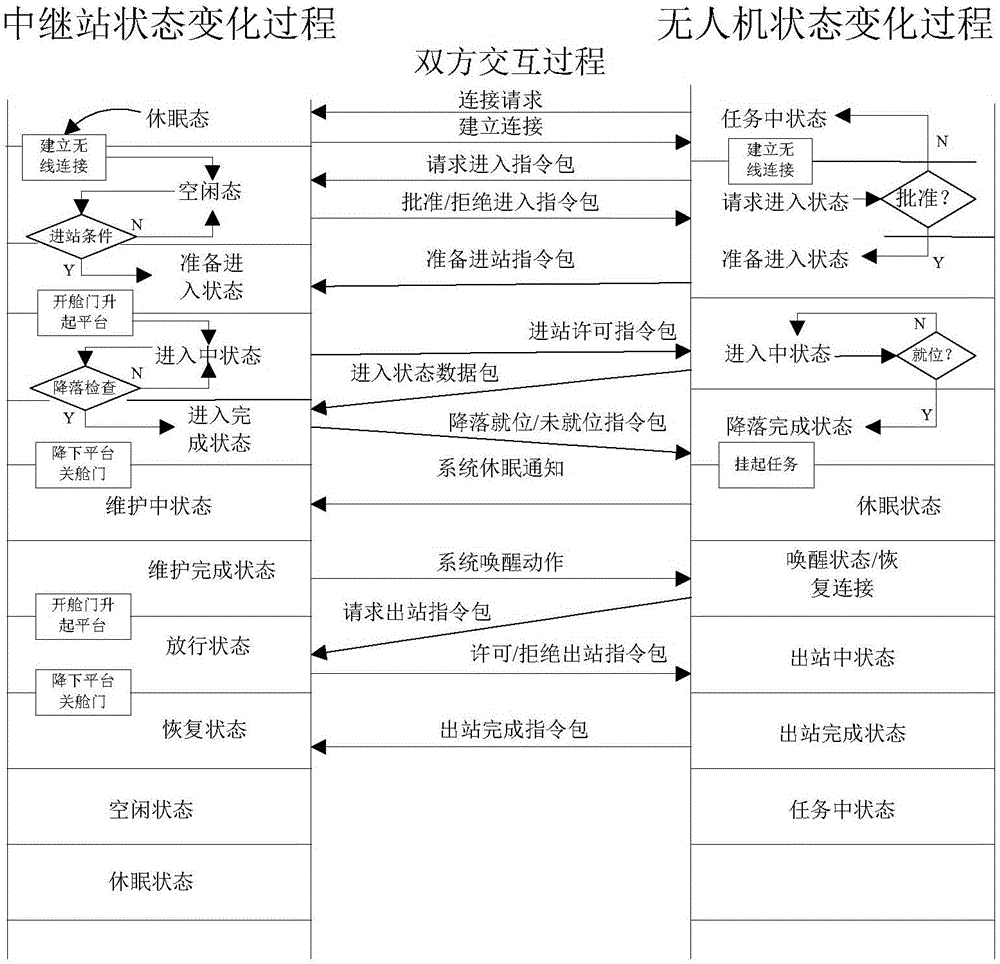
[0078] When the power of the UAV is insufficient, it is charged by a fixed charging device, or directly replaces the battery, replaces the memory card, etc. We call the fixed charging device a relay service station, and the replacement process is called maintenance.
[0079] To enter the relay service station for maintenance, the UAV needs to meet all the following process requirements: first, it needs to find the location of the relay service station, and it needs to get in touch with the built-in control computer of the relay service station, and monitor its...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More