

Intelligent robot, method of intelligent robot of automatically planning paths, and device
An intelligent robot and path technology, applied in the field of intelligent robots, can solve the problems of not being able to automatically plan the route and observe any position in the home, and achieve a simple and efficient path planning scheme, avoid traps, and improve real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the object, technical solution and beneficial effects of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
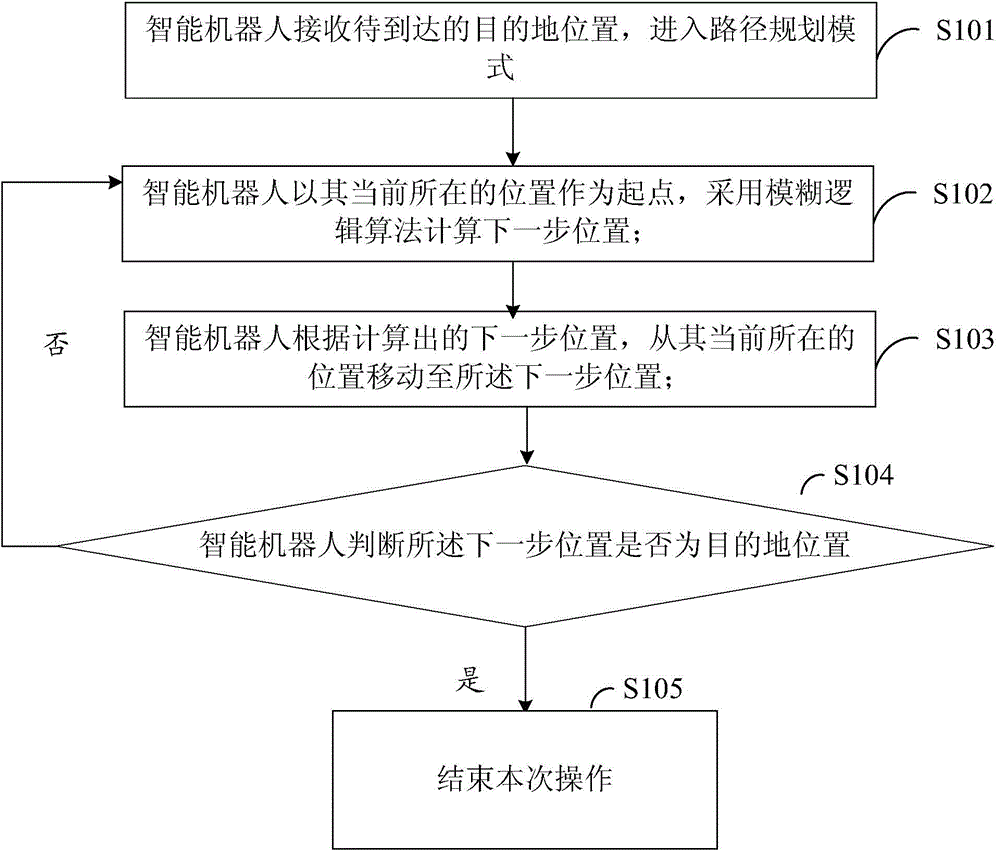
[0023] see figure 1 , is the implementation process of the method for the intelligent robot self-built path provided in Embodiment 1 of the present invention, which includes the following steps:
[0024] In step S101, the intelligent robot receives the destination location to be reached and enters the path planning mode;
[0025] In the embodiment of the present invention, for example, the operator can input the destination location through the touch screen of the intelligent robot; or input the destination location through a mobile phone or computer, and then transmit it to the wireles...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More