

Four-wheeler mechanism with adjustable eccentric distance
A four-wheel vehicle and eccentricity technology, which is applied in the direction of wheels, vehicle parts, control devices, etc., can solve the problems of not meeting the requirements of stability and obstacle-surmounting ability, and the problem of small ability, so as to reduce the range of bumps and improve the speed of crossing. Barrier ability, ensure the effect of self-locking ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solution of the present invention will be further described below in conjunction with the embodiments shown in the drawings.
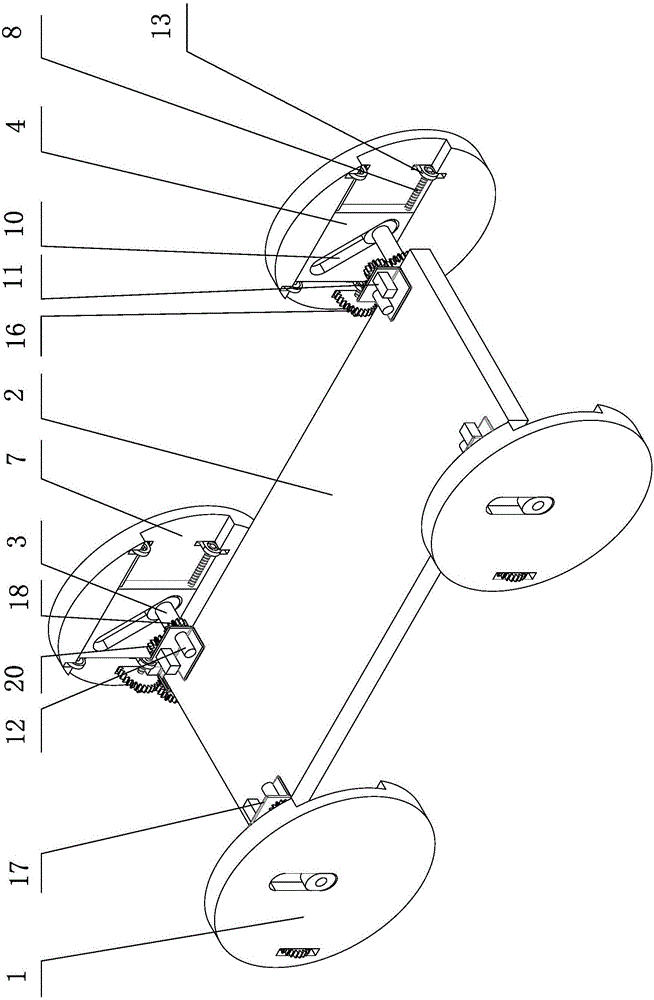
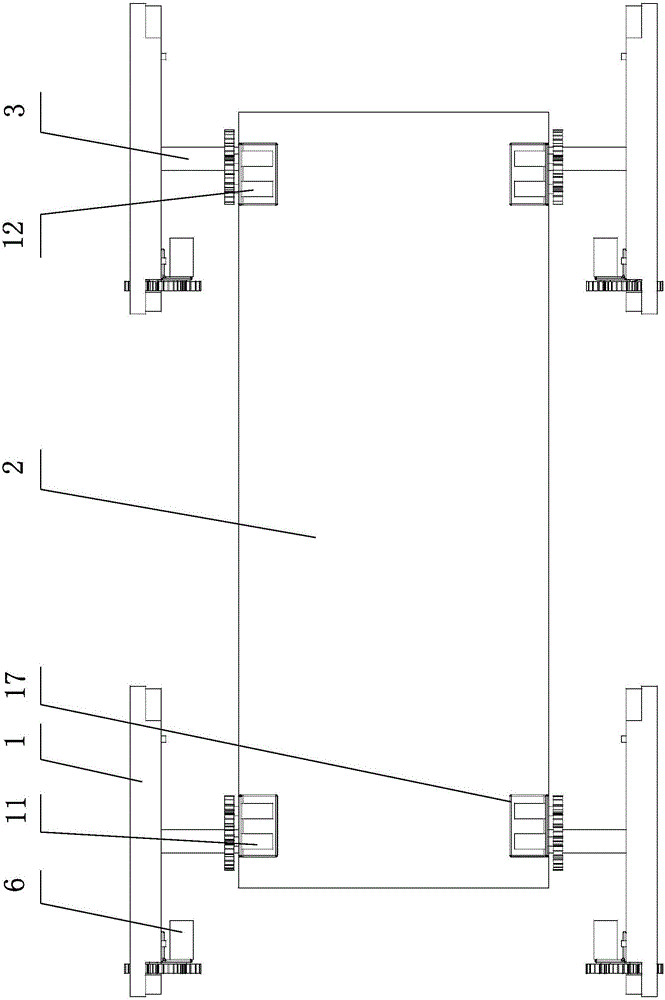
[0019] The four-wheel vehicle mechanism with adjustable eccentricity of the present invention includes wheels 1 symmetrically arranged on the left and right sides of the front part and the left and right sides of the rear part of the car body 2. Each wheel 1 includes a wheel body and a wheel center adjustment Components such as figure 1 , figure 2 Shown.
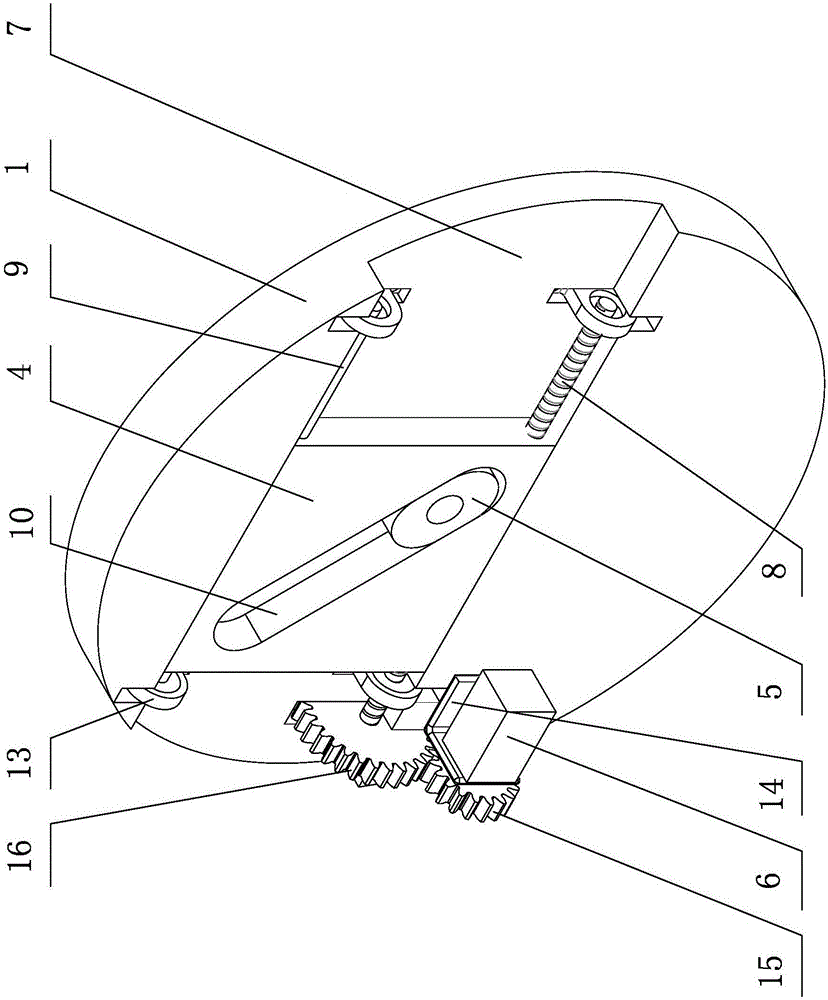
[0020] The wheel center adjustment assembly includes a square sliding plate 4, a sliding plate 5 and a sliding plate driving motor 6. The back of the wheel 1 (facing the car body 2) is provided with a lateral sliding groove 7 (not penetrating the wheel 1). The lower end of the sliding groove 7 exceeds the wheel center of the wheel 1. The sliding plate 4 is slidably mounted in the horizontal sliding groove 7 through a horizontal screw 8 and a horizontal guide rod 9. The horizontal scr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More