

Sliding mode control method and device
A control method and technology of a control device, applied in the field of data processing, capable of solving problems such as nonlinearity and sliding mode control chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
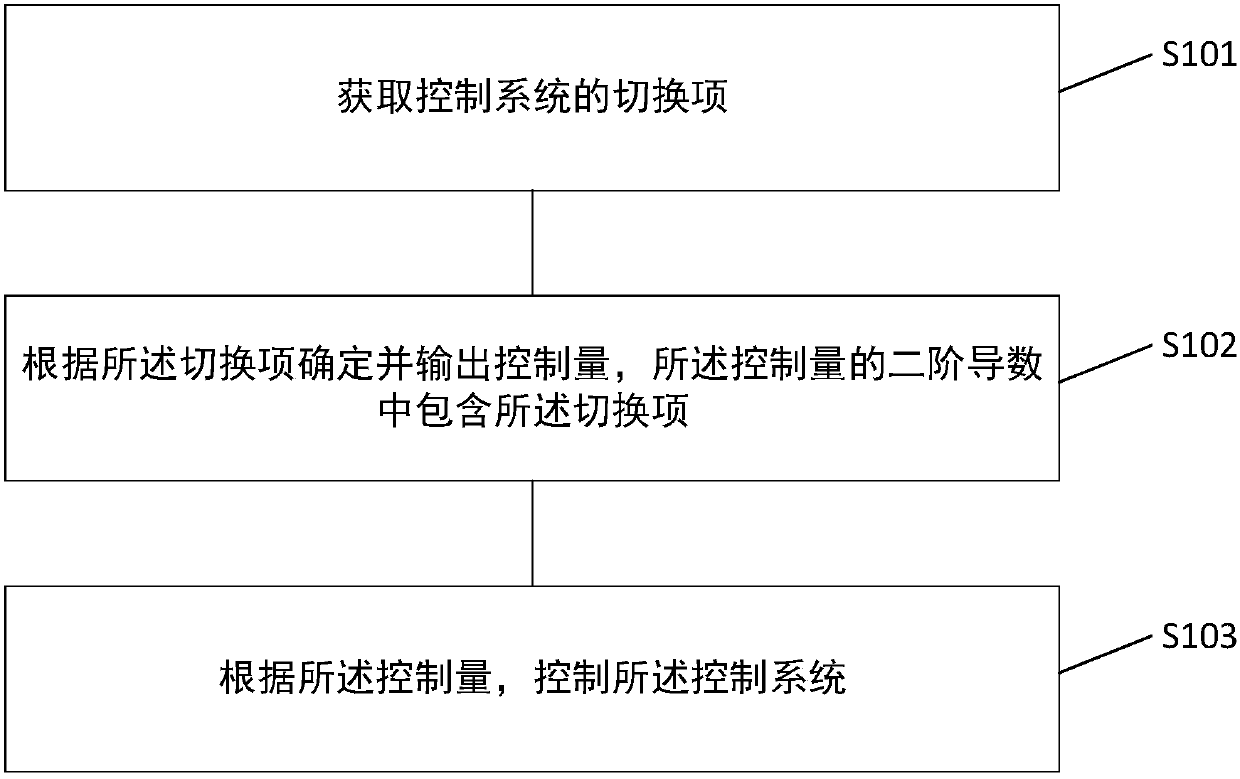
[0051] Such as figure 1 As shown, the embodiment of the present invention provides a sliding mode control method, including:
[0052] Step S101, acquiring switching items of the control system;
[0053] Step S102, determining and outputting a control quantity according to the switching item, and the second order derivative of the control quantity includes the switching item;
[0054] Step S103, controlling the control system according to the control amount.
[0055] In the embodiment of the present invention, the switching term is included in the second derivative of the control quantity, so that the control quantity is the second integral of the switching term, the rate of change of the control quantity is the primary integral of the switching term, and the switching term becomes continuous after integration, that is, the control quantity The rate of change of the control variable and the control variable are continuous, making the sliding mode control suitable for process ...
specific Embodiment 2
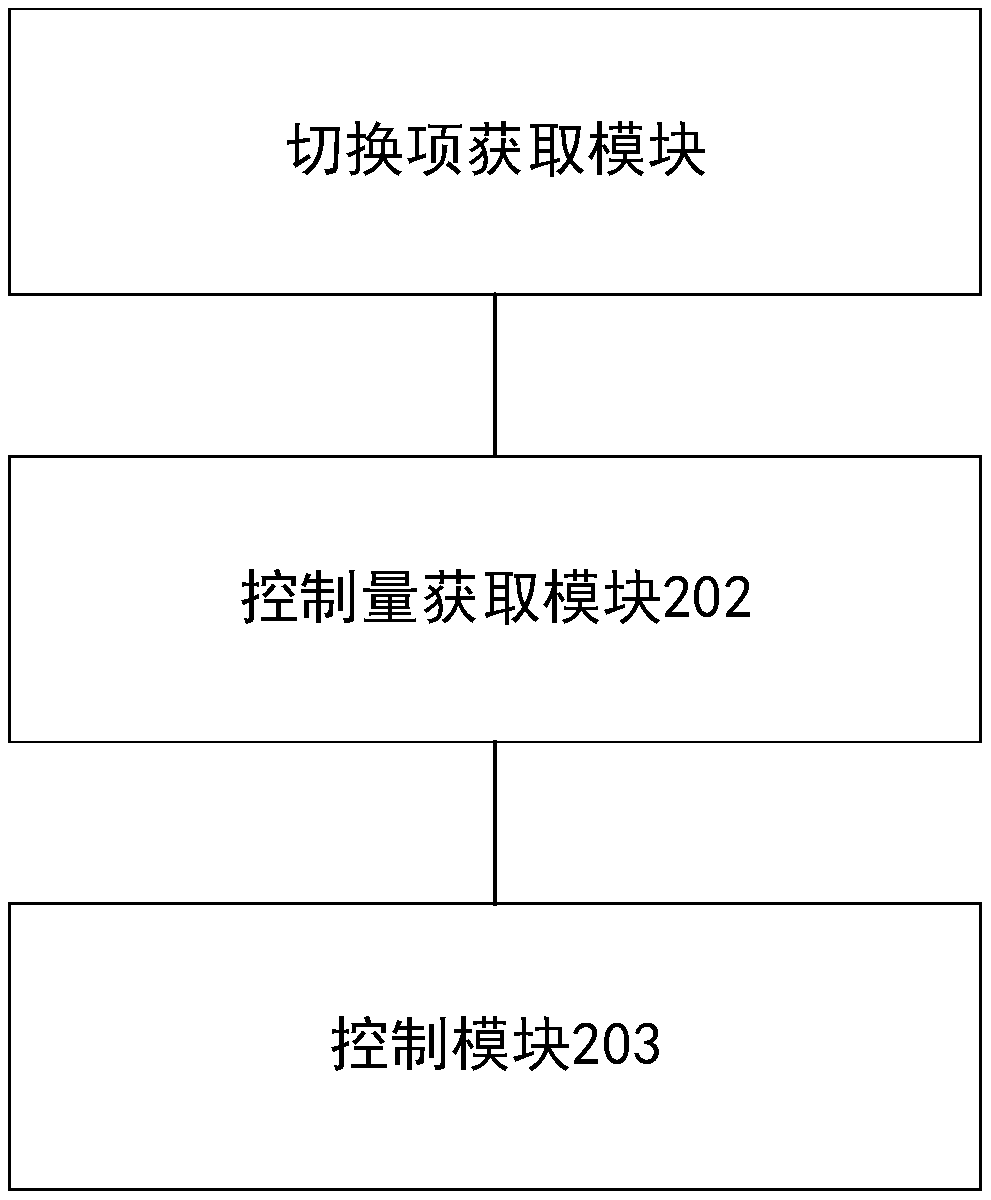
[0069] Such as figure 2 As shown, the embodiment of the present invention provides a sliding mode control device, including:
[0070] A switching item obtaining module 201, configured to obtain switching items of the control system;
[0071] A control quantity acquisition module 202, configured to determine and output a control quantity according to the switching item, and the second order derivative of the control quantity includes the switching item;
[0072] The control module 203 is configured to control the control system according to the control amount.
[0073] In the embodiment of the present invention, the switching term is included in the second derivative of the control quantity, so that the control quantity is the second integral of the switching term, the rate of change of the control quantity is the primary integral of the switching term, and the switching term becomes continuous after integration, that is, the control quantity The rate of change of the contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More