

Transformer substation intelligent patrol robot with mechanical arms and patrol method thereof
A technology for inspection robots and mechanical arms, applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low level of intelligence and no carrying of mechanical arms, etc., to improve the degree of intelligence, strong operational reliability, Control effects with high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
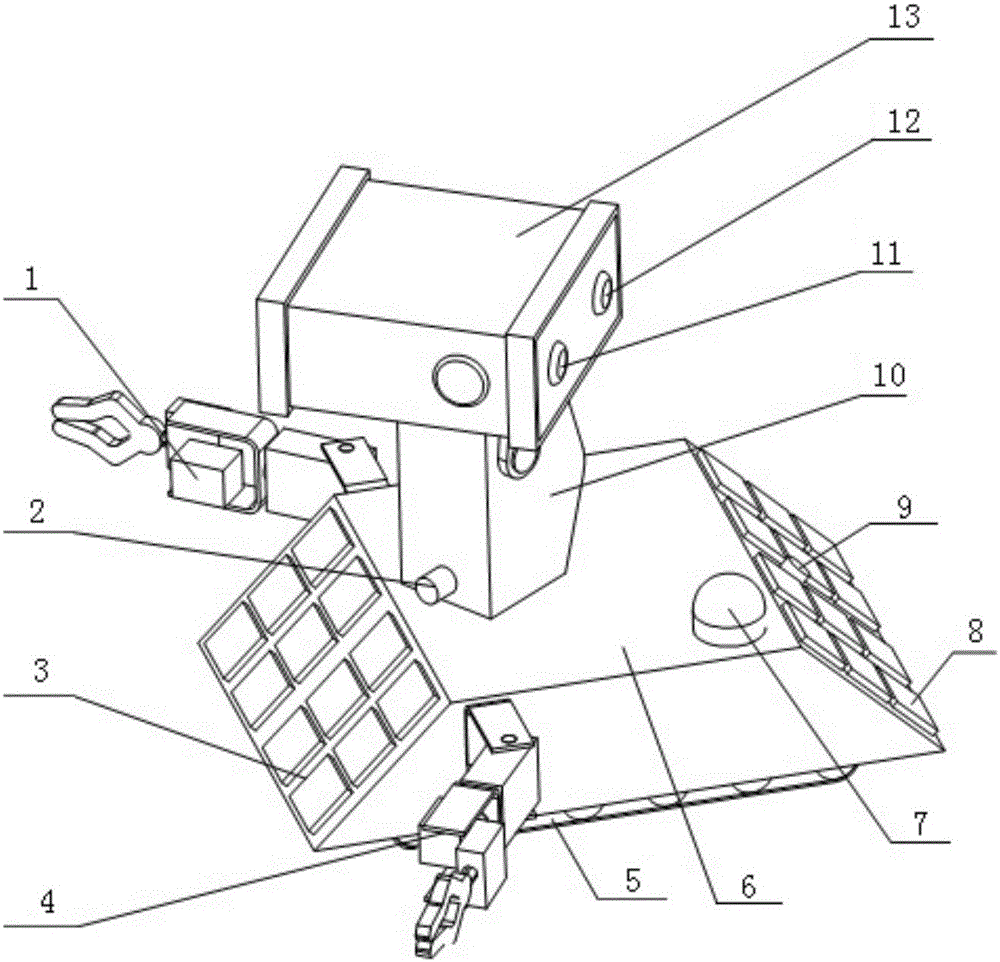
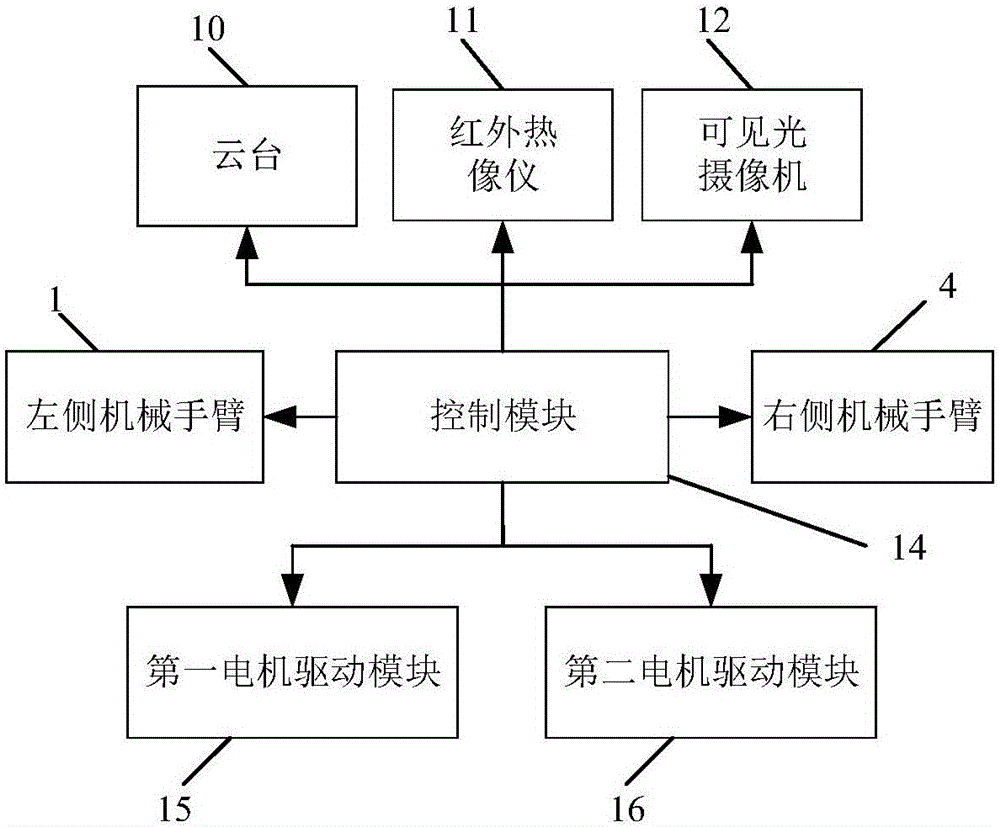
[0035] Such as figure 1 As shown, a substation intelligent inspection robot with a mechanical arm, the inspection robot includes a walking chassis, inspection equipment and a control module 14, the inspection equipment is installed on the walking chassis, and the control module 14 is respectively connected to the walking chassis and the inspection equipment, the walking chassis includes a chassis body 6, a crawler belt 5, a drive motor and a motor drive module, the crawler belt 5 is installed below the chassis body 6, and there are four drive motors, which are respectively installed on the left front, left rear, right front and right front of the crawler belt 5 At the right rear, the motor drive module includes a first motor drive module 15 and a second motor drive module 16, the first motor drive module 15 is connected to two drive motors installed on the left front and left rear of the crawler belt 5, and the second motor drive module 16 is connected to The two drive connect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More