

Force detection device and robot
A detection device and robot technology, applied in the direction of robots, manipulators, and the measurement of properties and forces using piezoelectric devices, etc., can solve problems such as large weight, small linear expansion coefficient, and redundancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
[0082]
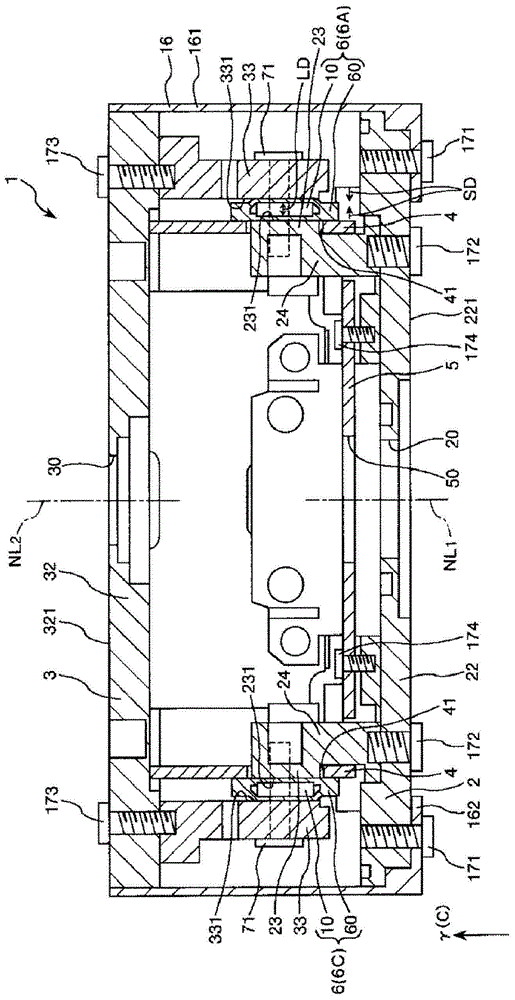
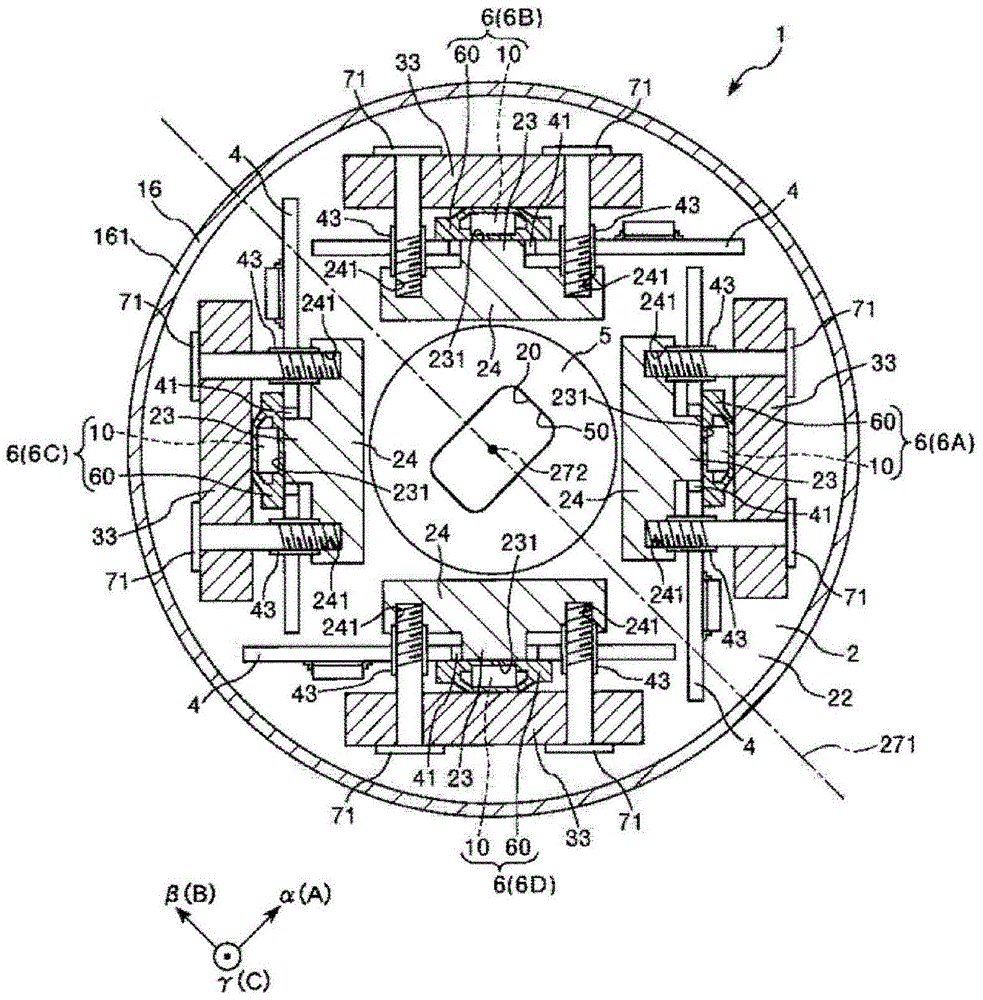
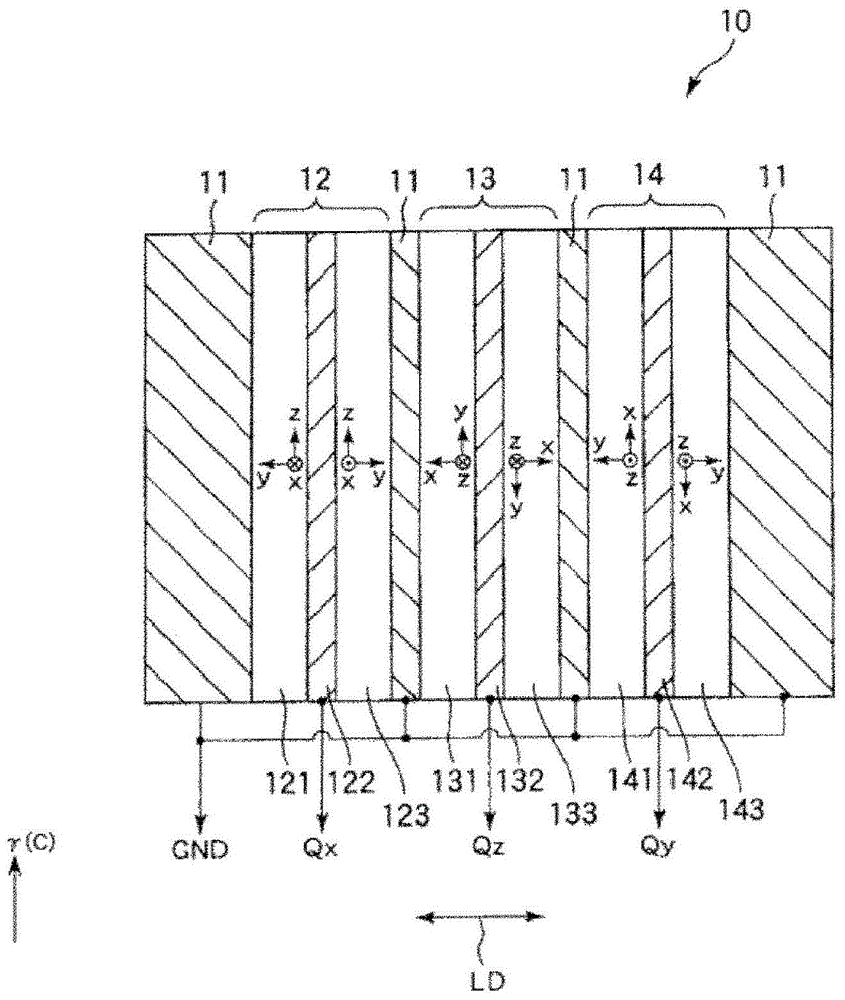
[0083] figure 1 It is a sectional view showing the force detection device of this embodiment. figure 2 yes figure 1 A cross-sectional view of the force detection device shown. image 3 is a brief representation figure 1 Cross-sectional view of the charge output element of the force-sensing device shown. Figure 4 is indicative figure 1 A diagram of the state where the force detection device is shown being heated. Figure 5 is indicative figure 1 In the force detection device shown, the first member of the first base and the third member of the second base are heated.
[0084] Additionally, the following, will figure 1 The upper side in is called "upper" or "upper", and the lower side is called "lower" or "below".
[0085] In addition, in figure 2 In FIG. 3 , an α axis, a β axis, and a γ axis are illustrated as three mutually orthogonal axes. In addition, in figure 1 , image 3 , of the three axes described above, only the γ axis is shown in the figure....
no. 2 approach
[0201]
[0202] Figure 6 is a cross-sectional view showing the force detection device of this embodiment ( Figure 7 BB line sectional view in). Figure 7 yes Figure 6 The cross-sectional view of the force detection device shown ( Figure 6 A-A line sectional view in). Figure 8 is to indicate that the Figure 6 A diagram of a case where the force detection device shown is applied as a force detection device of a robot. Figure 9 is to indicate that the Figure 6 A diagram of a case where the force detection device shown is applied as a force detection device of a robot. Figure 10 It is a diagram schematically showing a situation in which a conventional force detection device is applied as a force detection device for a robot. Figure 11 yes means Figure 9 A graph showing the output of the charge output element of the force sensing device. Figure 12 yes means Figure 10 A graph showing the output of the charge output element of the conventional force detection...
PUM
| Property | Measurement | Unit |
|---|---|---|
| density | aaaaa | aaaaa |
| density | aaaaa | aaaaa |
| density | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More