Method for robot trolley path following
A robot and car technology, applied in the field of information processing, can solve the problems of prone to jitter, rapid steering of robot car, and insufficient smooth movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
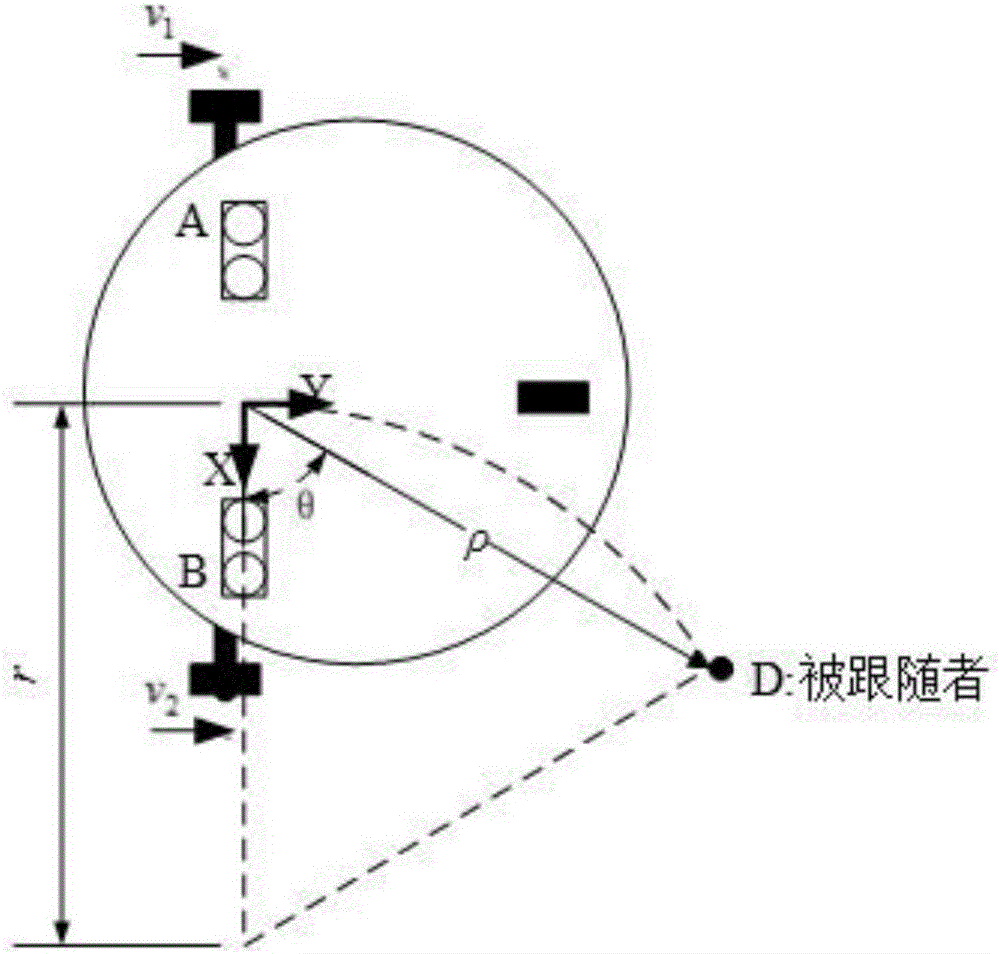
[0037] Embodiment 1: as figure 1 , figure 2 As shown, a robot car path following method, the first ultrasonic module A and the second ultrasonic module B are respectively installed on both sides of the robot car.
[0038] If the follower is at D, the robot car will arrive at D along the dotted arc trajectory, and its following speed is proportional to ρ; ρ is the linear distance from the robot to the target point.
[0039] Specifically, build as figure 1 In the robot coordinate system shown, the coordinate origin is located at the center of the rear wheel (AB center), the direction of the y-axis is the forward direction of the car, and the direction of the x-axis is the axial direction of the rear wheel. The coordinates of the follower D in the robot coordinate system are (x, y), then:
[0040] ρ = x 2 + y 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com