

Manipulator
A manipulator and finger technology, applied in the field of manipulators, can solve the problems of simple movements, limited number of motors, low manipulator flexibility, etc., to achieve the effect of improving flexibility and ensuring flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the present invention.
[0019] The invention provides a manipulator.
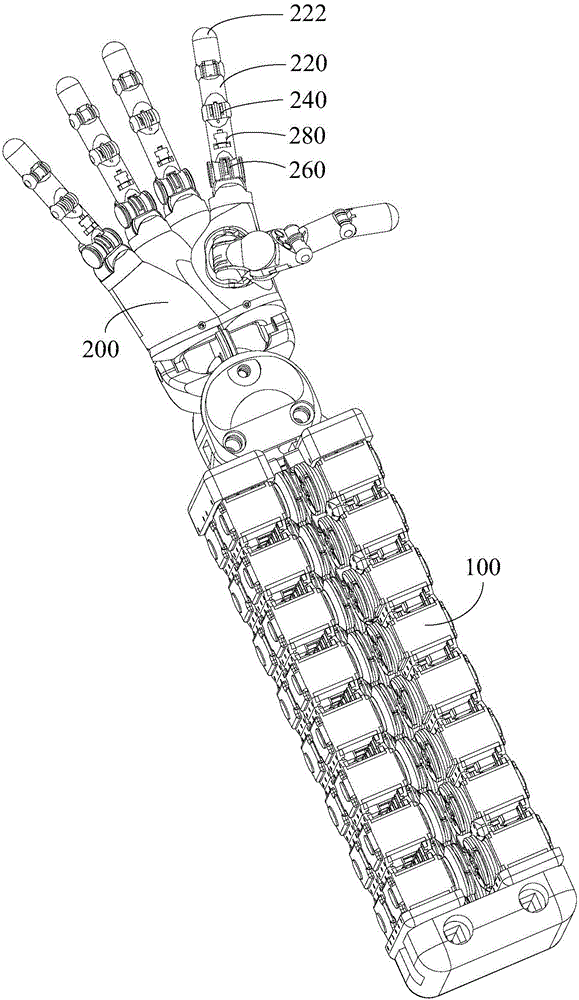
[0020] refer to figure 1 , figure 1 This is a three-dimensional structure schematic diagram of an embodiment of the manipulator of the invention.
[0021] The manipulator of the present embodiment comprises an arm 100 and a palm 200 that is rotatably mounted on one end of the arm 100; the palm 200 is a palm 200 that imitates five fingers and joint distribution of a human body; several drive motors ( Not marked); the driving motor is used to drive the palm 200 to rotate and / or drive the fingers 220 to bend or stretch; each of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More