

Two-degree-of-freedom flexible parallel mechanism for motion decoupling
A degree of freedom, flexible technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as small strokes, achieve compact structure, no accumulation of errors in structure, and reduce assembly processes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
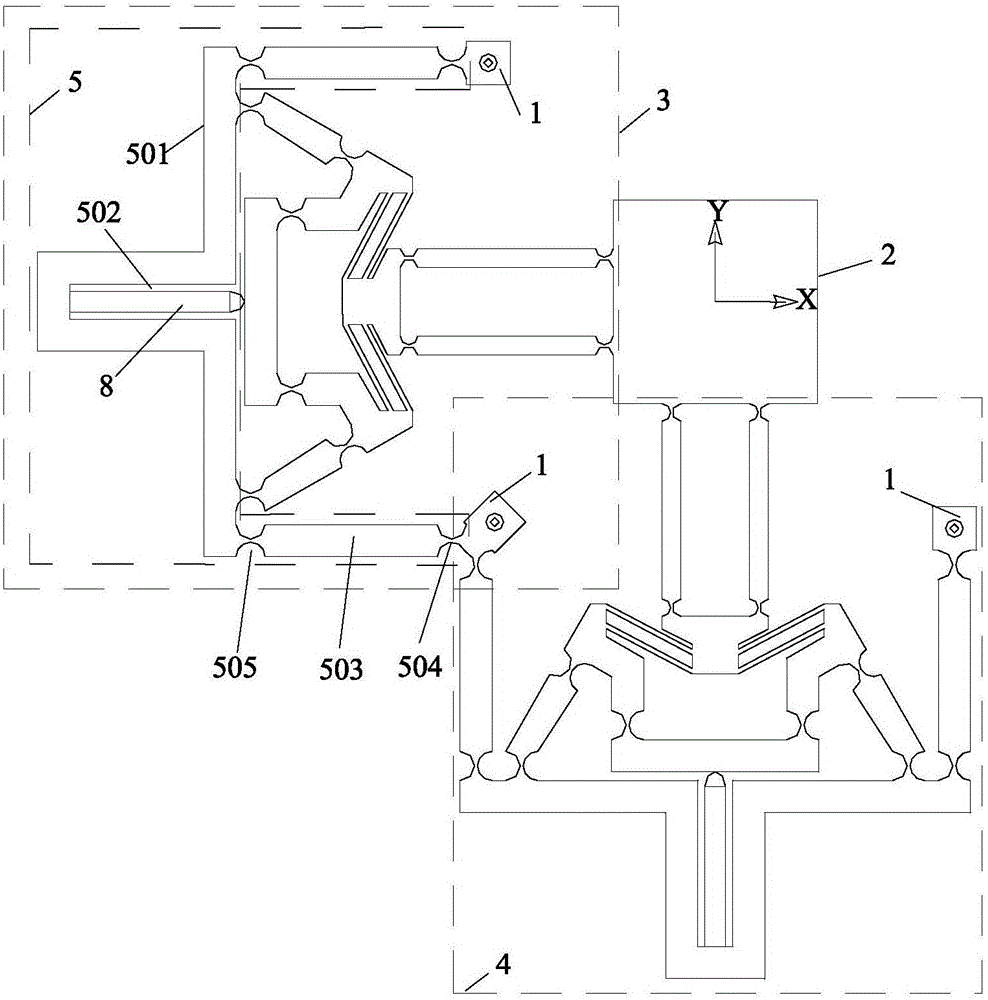
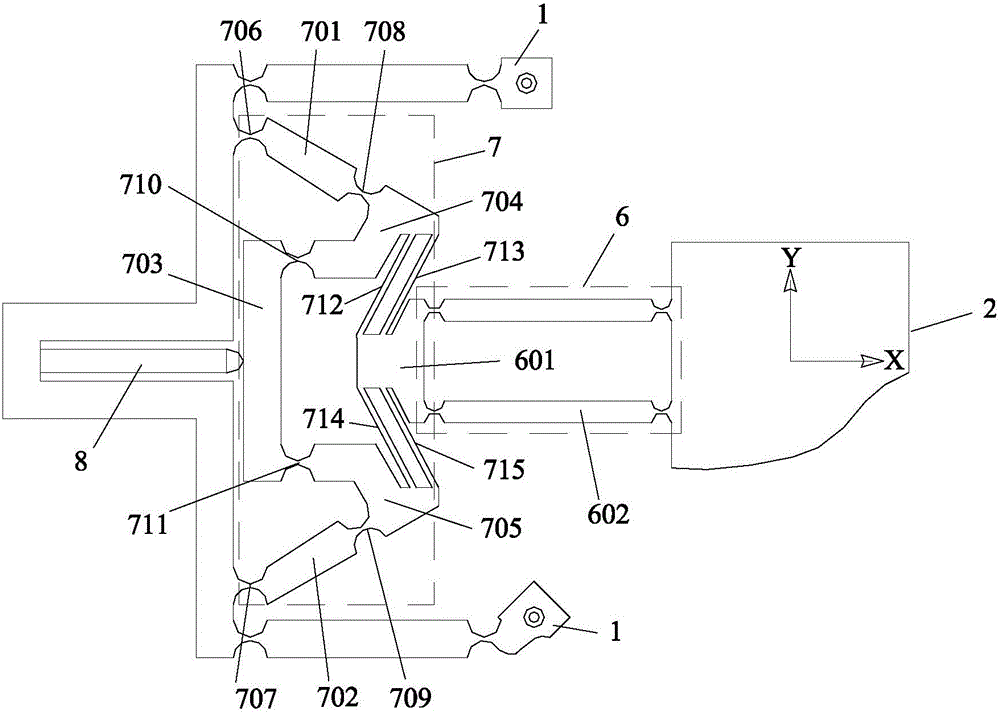
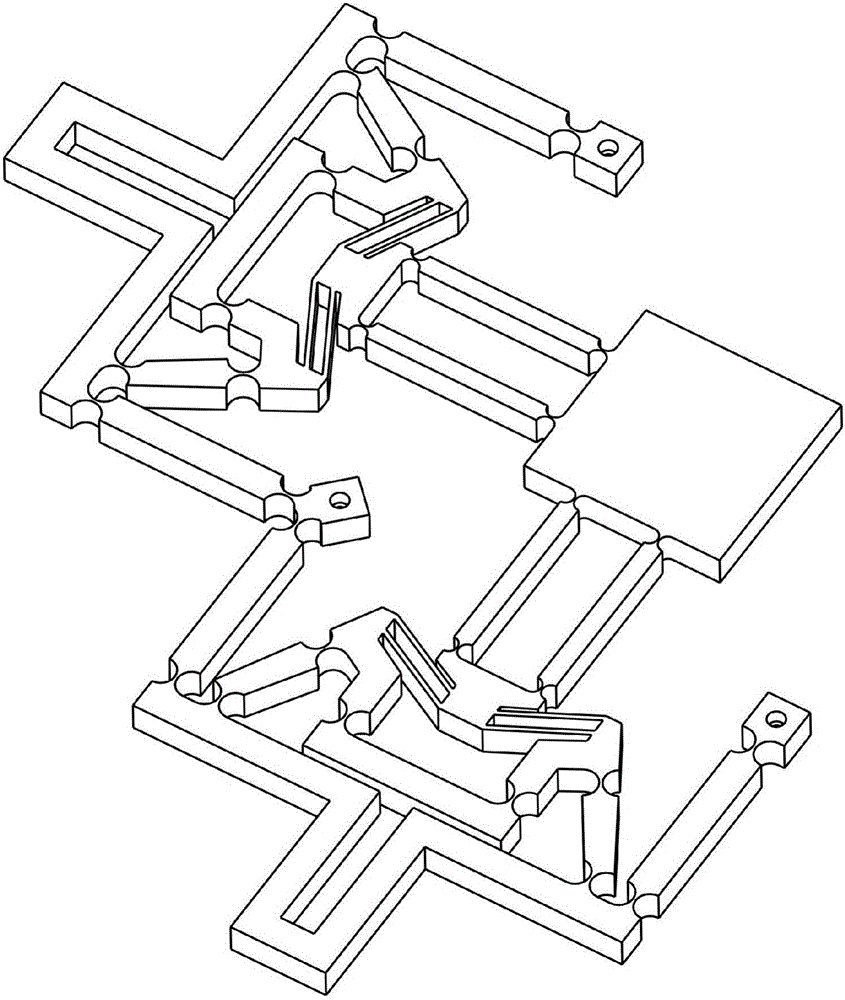
[0022] refer to Figure 1 to Figure 3 , a motion-decoupled two-degree-of-freedom compliant parallel mechanism, including a base 1, a moving platform 2, an X-axis branch chain 3 and a Y-axis branch chain 4, the base 1 and the moving platform 2 pass through the X The shaft branch chain 3 is connected to the Y-axis branch chain 4; the X-axis branch chain 3 and the Y-axis branch chain 4 are distributed orthogonally, and have the same structure, and both include a first parallel four-bar guide mechanism 5, a second parallel four Rod guiding mechanism 6 and displacement amplification mechanism 7. The first parallel four-bar guide mechanism 5 is connected to the base 1, the second parallel four-bar guide mechanism 6 is connected to the moving platform 2, and the displacement a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More