

Electric clamping jaw
A gripper and electric technology, which is applied in the field of robot systems, can solve problems such as thin-walled parts deformation, insufficient clamping force, and workpiece slippage, and achieve the effect of not being easy to slip or deform
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
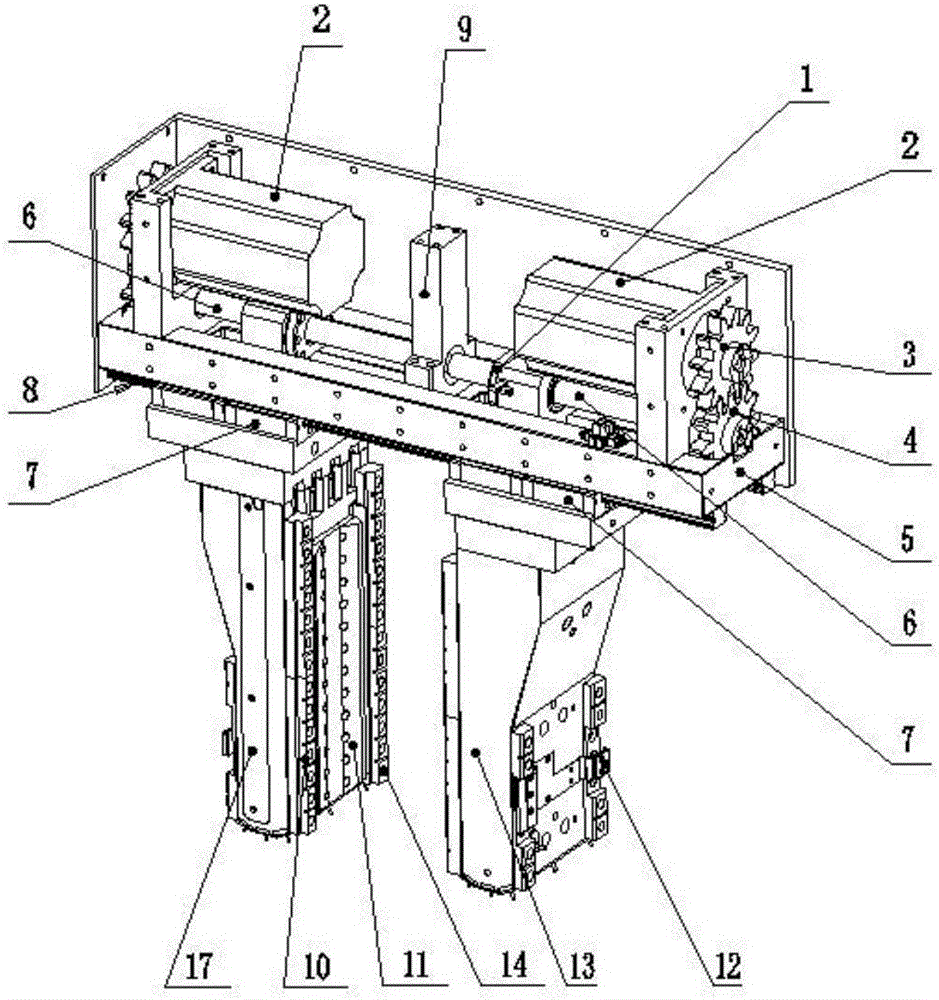
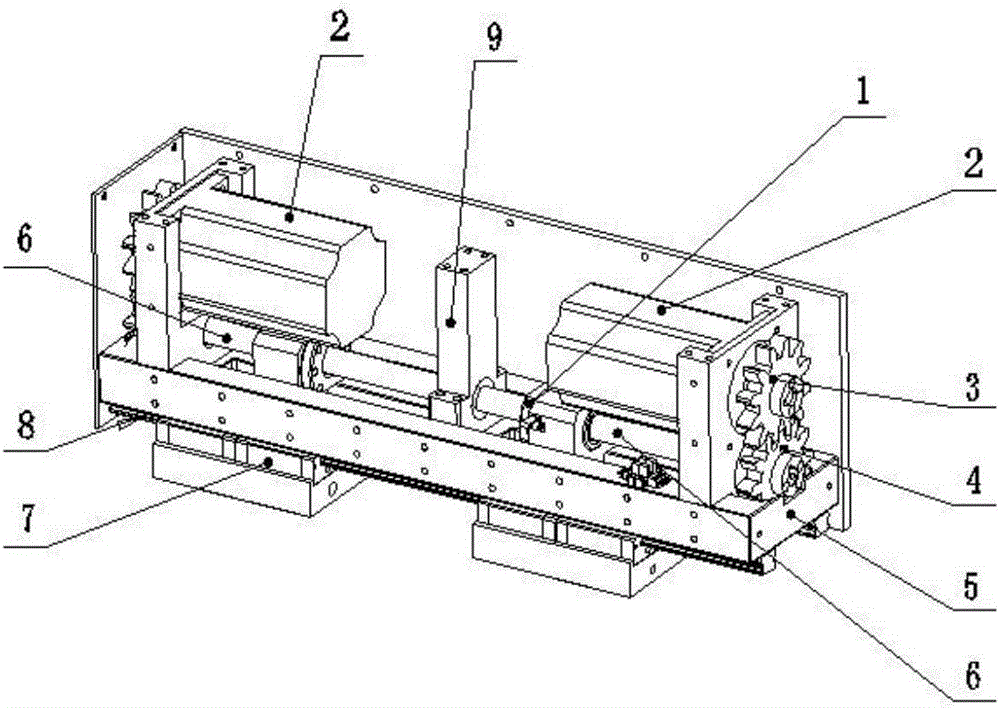
[0030] Such as figure 1 and figure 2 As shown, an electric gripper includes a driving part and a gripper, the gripper includes a first gripper 13 and a second gripper 17, a mounting plate 5 is provided at the bottom of the driving part, and the top of the mounting plate 5 is along the clamping direction There are two ball screws 6 symmetrically, one end of the ball screw 6 is installed with a driven gear 4, the driven gear 4 is connected with the main gear 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More