

Hand exoskeleton device for rehabilitation training
A rehabilitation training and exoskeleton technology, which is applied in the direction of manipulators, passive exercise equipment, program-controlled manipulators, etc., can solve problems such as limited degrees of freedom, difficulty in supporting independent coordinated movement of each finger, complex structure, etc., and achieve small weight and easy Assembly, low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0023] The hand exoskeleton device for rehabilitation training of the present invention, its preferred embodiment is:
[0024] Including the back of the hand mechanism, power source, index finger exoskeleton, middle finger exoskeleton, ring finger exoskeleton, little finger exoskeleton, thumb exoskeleton, the power source is fixed on the back of the hand mechanism and is connected with the index finger exoskeleton, middle finger exoskeleton, ring finger The skeleton, little finger exoskeleton, and thumb exoskeleton are connected separately;
[0025] The back of the hand mechanism includes a back of the hand platform, a motor support, and a screw support. The back of the hand mechanism is fixed on the patient's hand through a strap, and the motor support and the screw support are fixed on the back of the hand platform;
[0026] The power source includes an index finger part, a middle finger part, a ring finger part and a little finger part, and the index finger part includes an...
specific Embodiment
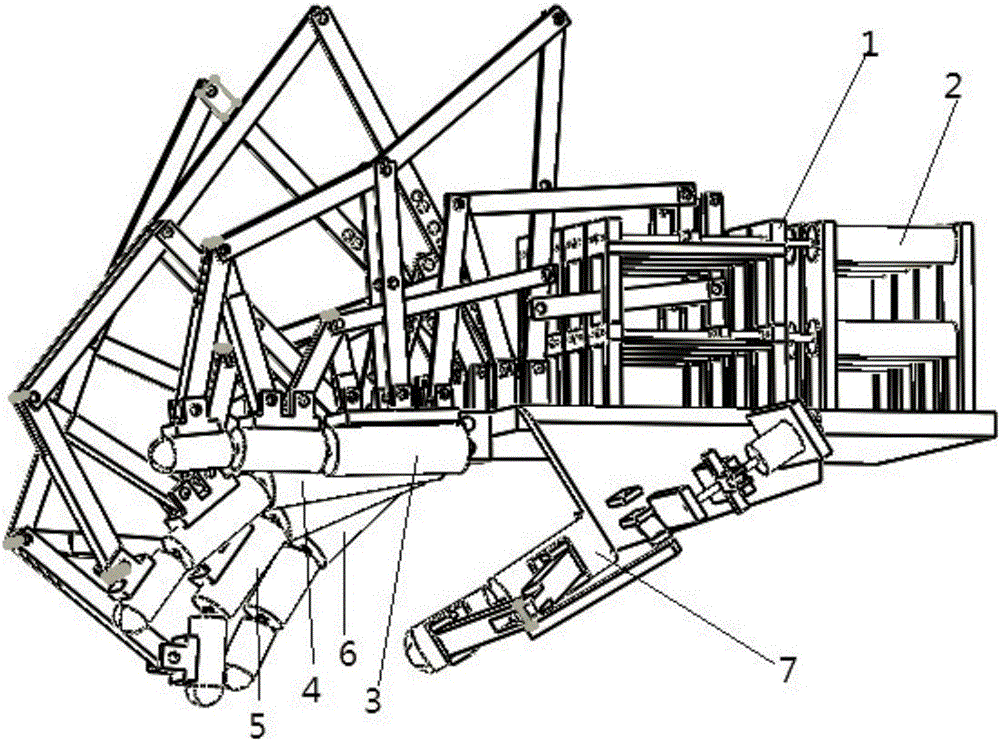
[0040] combine figure 1 Explain that a hand exoskeleton device for rehabilitation training includes a back mechanism 1, a power source 2, an index finger exoskeleton 3, a middle finger exoskeleton 4, a ring finger exoskeleton 5, a little finger exoskeleton 6, a thumb exoskeleton 7, etc.; The source 2 is fixed on the back mechanism 1, and the index finger exoskeleton 3, middle finger exoskeleton 4, ring finger exoskeleton 5, little finger exoskeleton 6, and thumb exoskeleton 7 are connected to the power source respectively.
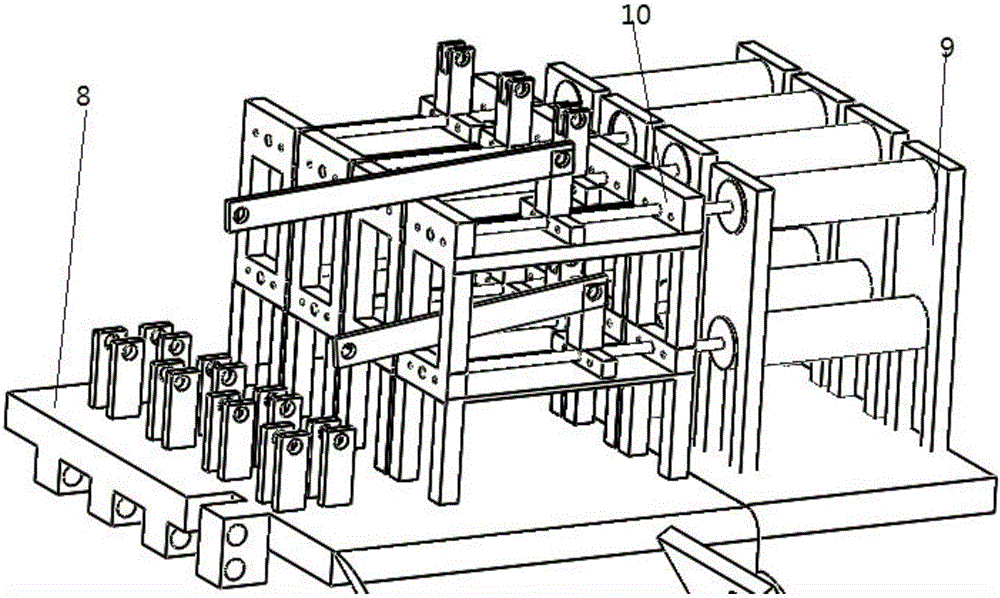
[0041] combine figure 2 To illustrate, the back-of-hand mechanism 1 includes a back-of-hand platform 8, a motor support 9, a screw support 10, and the like. The front end of the back of the hand platform 8 is a connection point for being hinged with four finger exoskeletons, the middle part is four identical screw supports 10 for placing screw rods and sliders, and the rear end is four motor supports 9 .
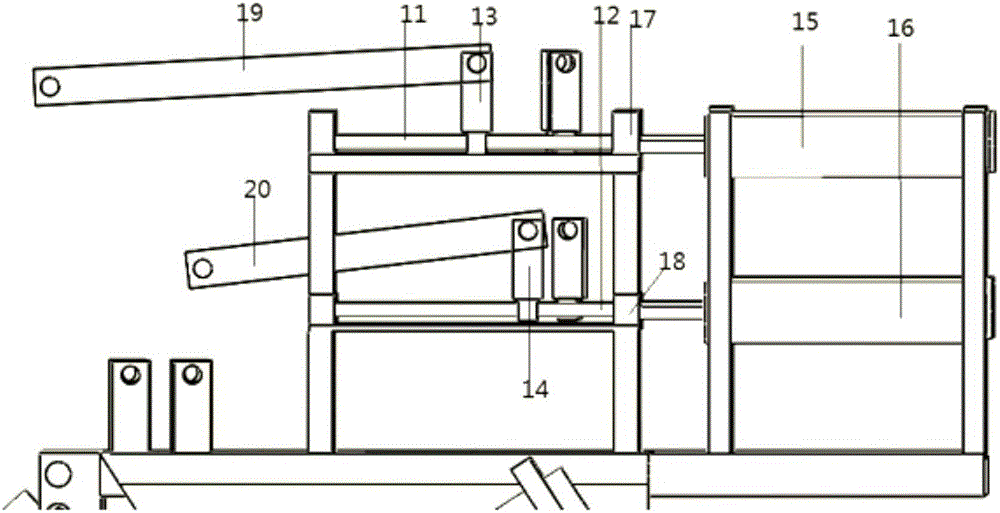
[0042] combine image 3 Explain that the power...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More