Anti-interference attitude control method for Mars lander with uncertain rotational inertia
A technology of moment of inertia and attitude control, applied in the direction of the guidance device of space navigation vehicle, can solve the problem of inability to guarantee the attitude control accuracy of the lander, and achieve the effect of improving engineering application value, anti-interference and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
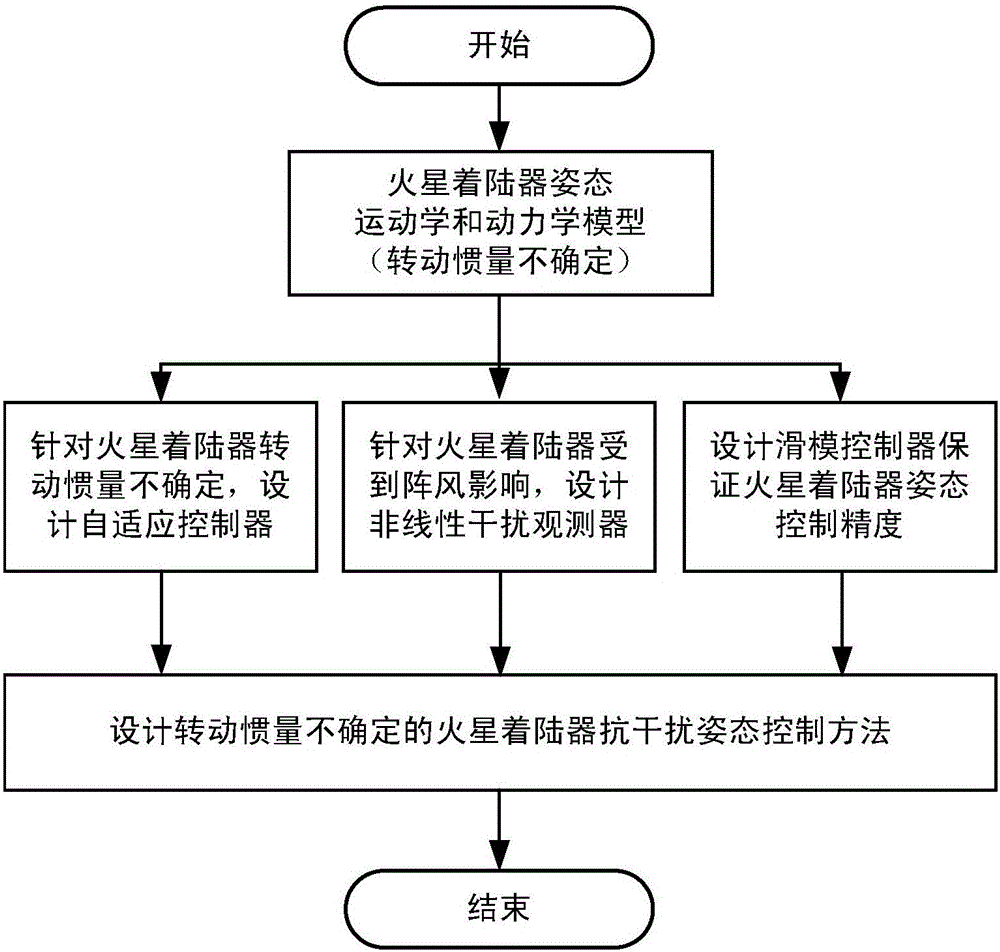
[0049] Such as figure 1 As shown, the specific implementation steps of the present invention are as follows (the following takes the Mars lander attitude control system as an example to illustrate the specific implementation of the method):
[0050] 1. Build the attitude kinematics and dynamics model of the Mars lander with uncertain moment of inertia
[0051] The posture kinematics and dynamics model of Mars lander with uncertain moment of inertia is constructed as follows:
[0052] X 1 : J ω · e = - [ ( ω e + R ( σ e ) ω d ) X ] J ( ω e + R ( σ e ) ω d ) + J ( [ ω e X ] R ( σ e ) ω d - R ( σ e ) ω · d ) + u + d
[0053] X 2 : σ · e = G ( σ e ) ω e
[0054] X 3 : G ( σ e ) = 1 2 ( 1 - σ e T σ e 2 I 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



