

A multi-objective passive co-localization method based on multi-hypothesis quasi-Monte Carlo
A quasi-Monte Carlo and cooperative positioning technology, applied in the field of multi-target passive cooperative positioning based on multi-hypothesis pseudo-Monte Carlo, can solve the problems of low observable target track initiation and maintenance, and improve target positioning and tracking Accuracy, the effect of improving real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with accompanying drawing.
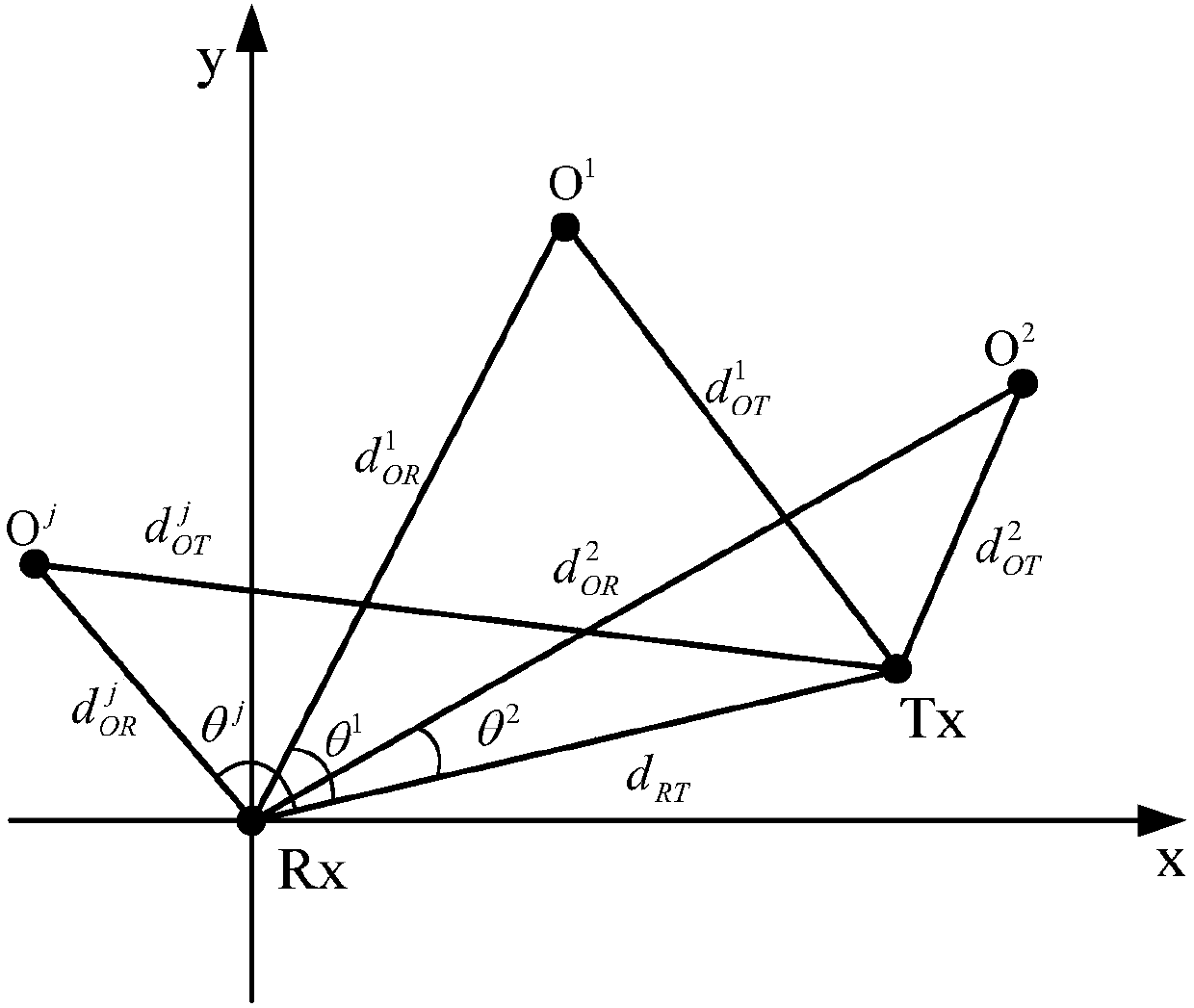
[0027] figure 1 It is a schematic diagram of the dual-base station PCL system of the present invention. figure 1 Among them, Tx represents the external radiation source, Rx represents the receiving station, Ο 1 Indicates the first target, Ο 2 Indicates the second target, Ο j represents the jth target, means Ο 1 distance from Rx, means Ο 2 distance from Rx, means Ο j distance from Rx, means Ο 1 distance from Tx, means Ο 2 distance from Tx, means Ο j Distance from Tx, d RT Indicates the distance between Rx and Tx, θ 1 Indicates Rx and Tx, Ο 1 The angle between, θ 2 Indicates Rx and Tx, Ο 2 The angle between, θ j Indicates Rx and Tx, Ο j angle between. Rx consists of a monitoring antenna and a reference antenna, where the monitoring antenna receives the signal transmitted by Tx and passes through Ο j The reflected signal refers to the direct signal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More