

Control method and control device of electric balance car
The technology of an electric balance car and control method is applied in the direction of control devices, motor vehicles, transportation and packaging, etc., which can solve the problems of driver hazards, etc., and achieve the effect of convenient and fast passing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0051] Refer below figure 1 Describe the control method of the electric balance car according to the embodiment of the present invention.
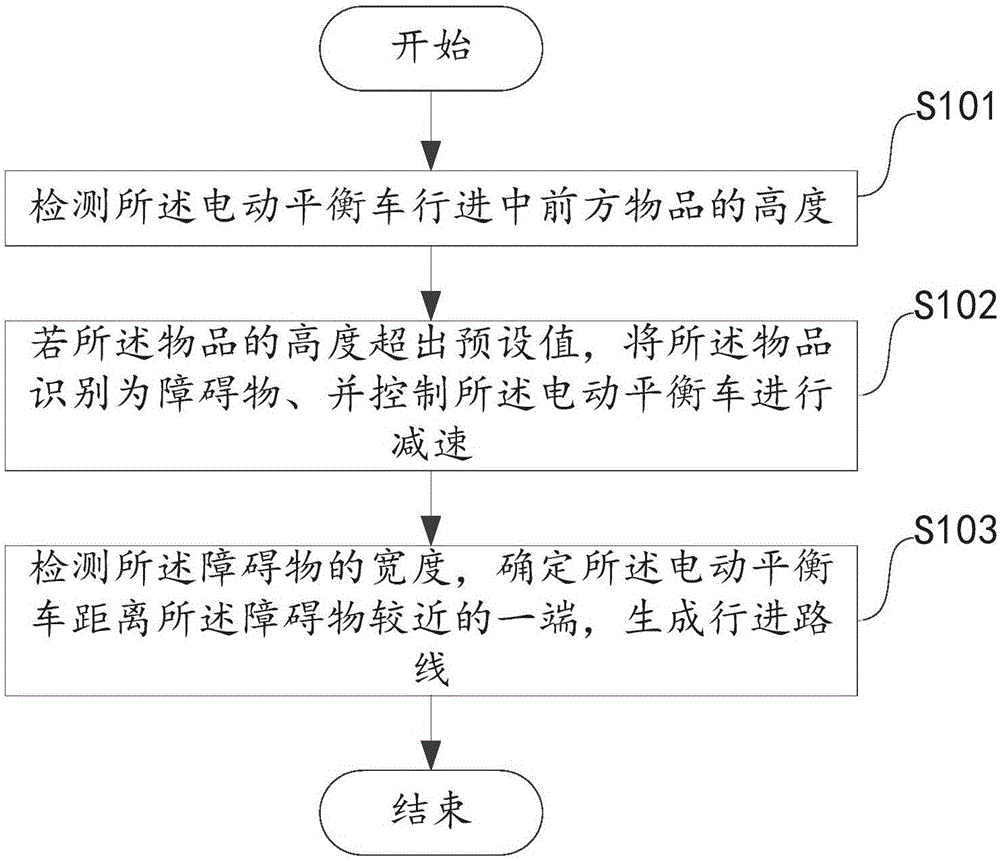
[0052] Such as figure 1 Shown is a schematic flow chart of a control method for an electric balance car according to an embodiment of the present invention. The control method for an electric balance car includes the following steps:
[0053] S101: Detecting the height of the items in front of the electric balancing vehicle during travel;
[0054] S102: If the height of the item exceeds a preset value, identify the item as an obstacle, and control the electric balance car to decelerate;
[0055] S103: Detect the width of the obstacle, determine the end of the electric balancing vehicle that is closer to the obstacle, and generate a traveling route.
[0056] In step S101 , when the electric balancing vehicle of this embodiment encounters an object while traveling, it first detects the height of the object to determine whether the object ...
Embodiment 2
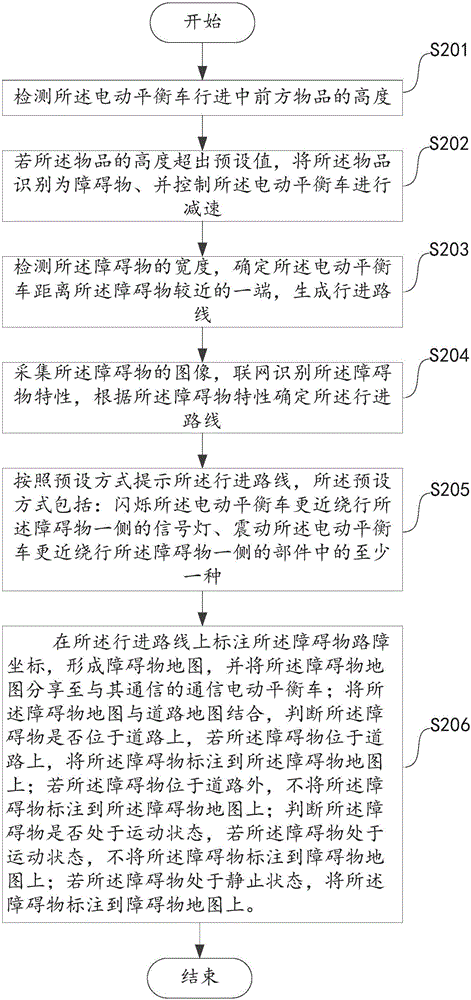
[0061] Such as figure 2 Shown is a schematic flow chart of the control method of the electric balance car according to the second embodiment of the present invention. The control method of the electric balance car includes the following steps:
[0062] S201: Detect the height of the items in front of the electric balancing vehicle while it is moving;
[0063] S202: If the height of the item exceeds a preset value, identify the item as an obstacle, and control the electric balance car to decelerate;
[0064] S203: Detect the width of the obstacle, determine the end of the electric balancing vehicle that is closer to the obstacle, and generate a traveling route;
[0065] S204: Collect images of the obstacles, identify characteristics of the obstacles online, and determine the travel route according to the characteristics of the obstacles;
[0066] S205: Prompt the travel route according to the preset method, the preset method includes: flashing the signal light on the side wh...
Embodiment 3
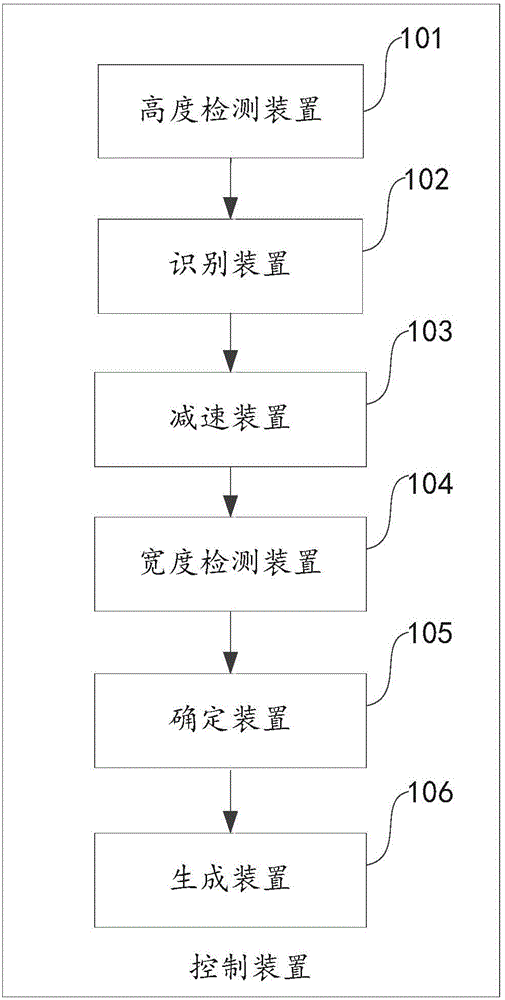
[0085] Such as image 3 Shown is a schematic diagram of the control device of the electric balance car in Embodiment 3 of the present invention, and the control device includes:
[0086] Height detection device 101, used to detect the height of the items in front of the electric balance car;
[0087] An identification device 102, configured to identify the item: if the height of the item exceeds a preset value, identify the item as an obstacle;
[0088] The deceleration device 103 is a device for controlling the deceleration of the electric balance car;
[0089] a width detection device 104, configured to detect the width of the obstacle;
[0090] A determining device 105, configured to determine the end of the electric balancing vehicle that is closer to the obstacle;
[0091] Generating means 106, configured to generate a traveling route.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More