

Four-degree-of-freedom multi-pose lower limb rehabilitation robot
A rehabilitation robot, multi-pose technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of limited posture training mode and single function.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
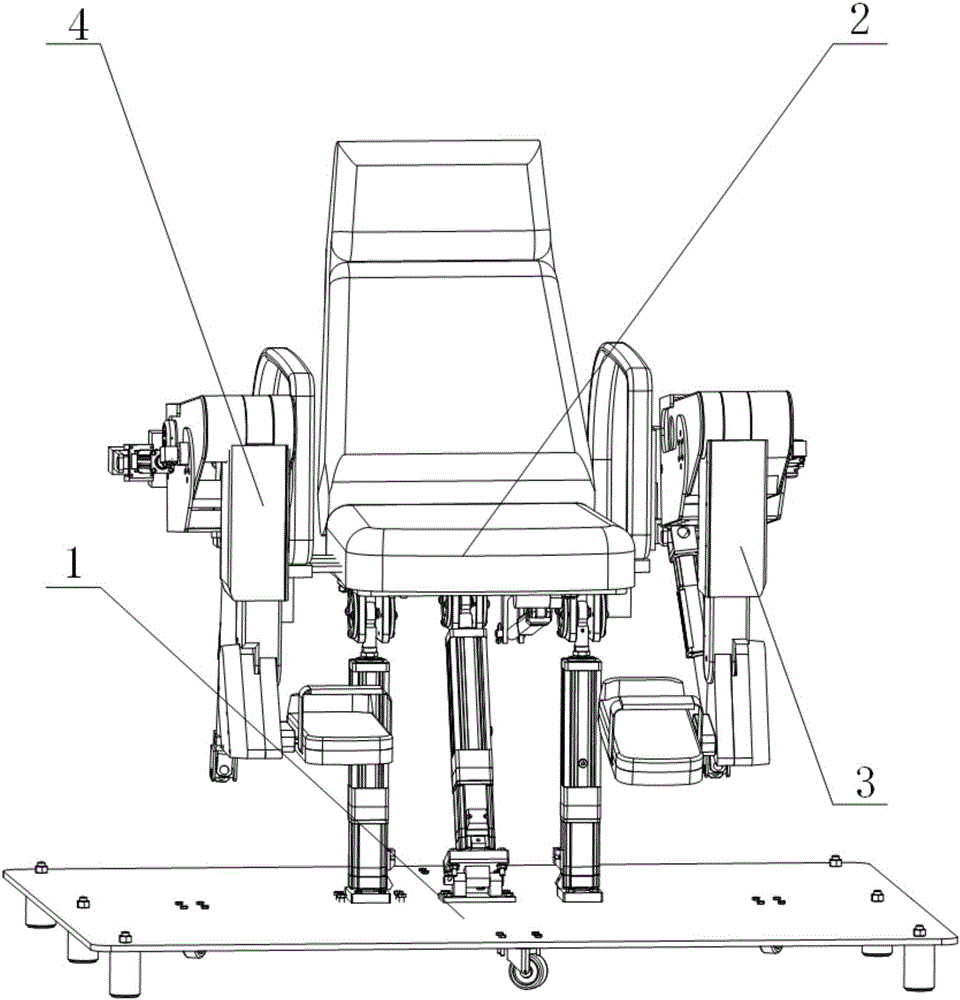
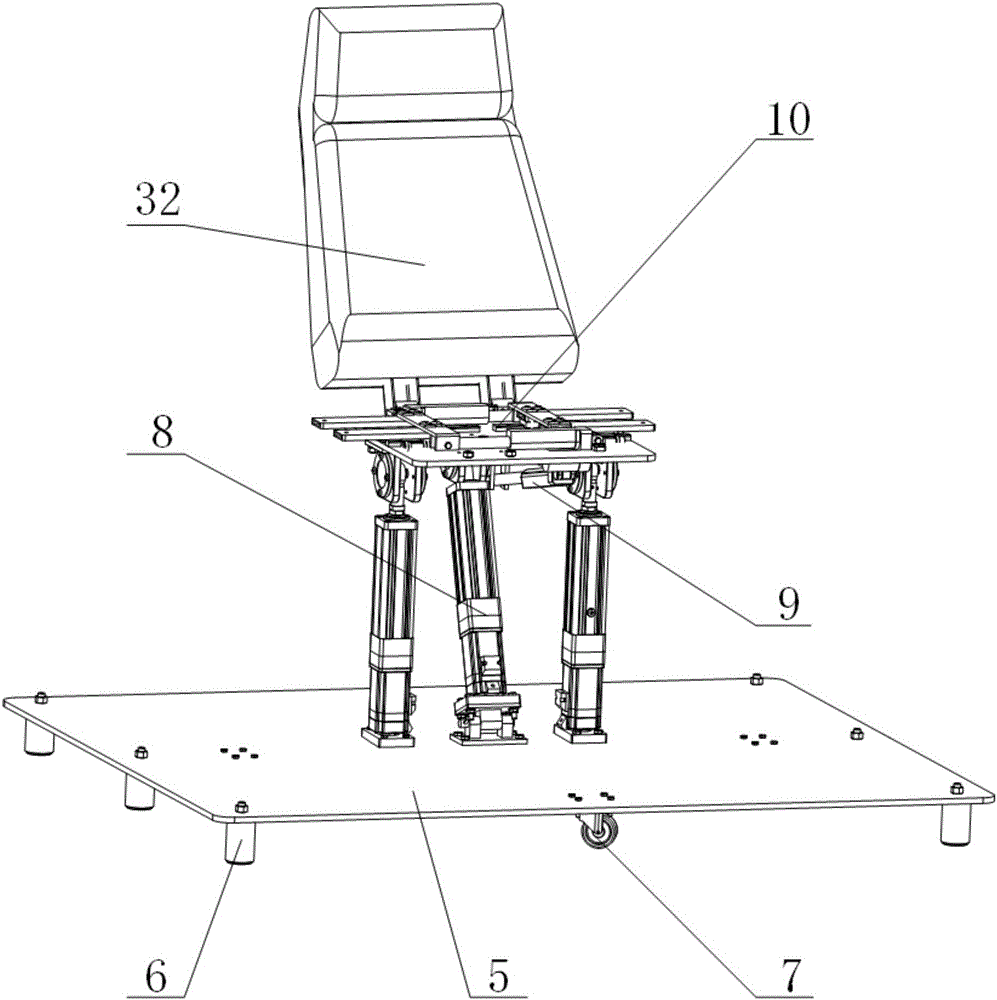
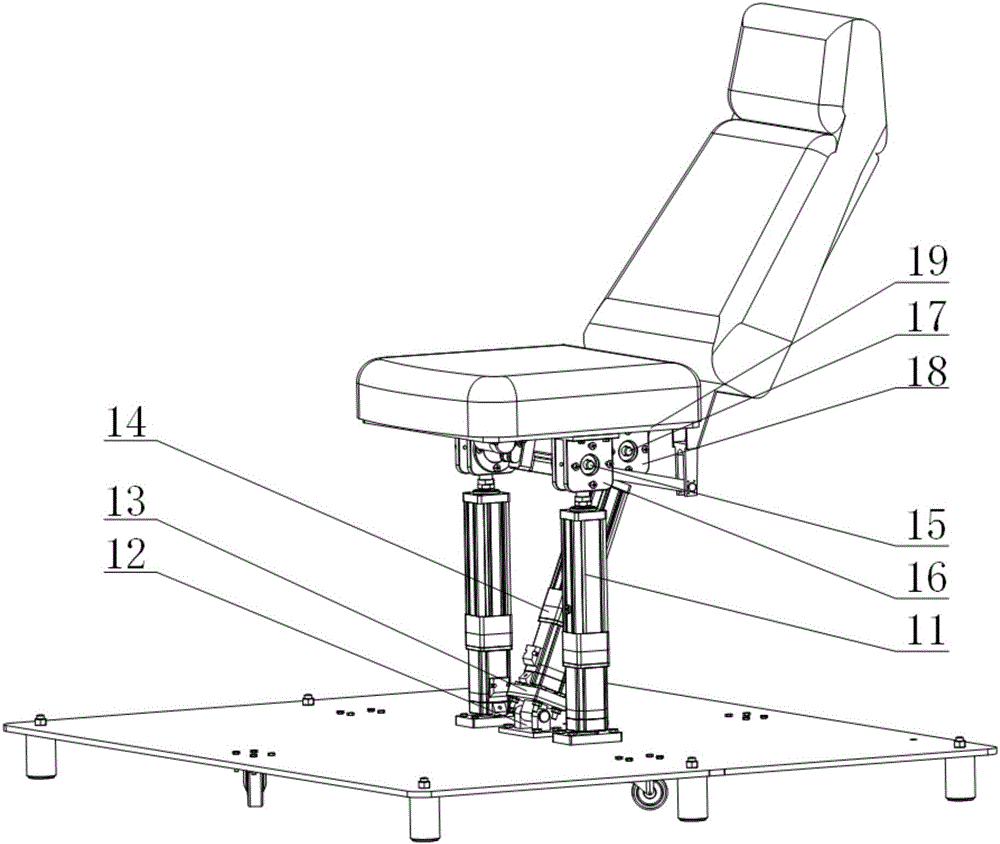
[0035] exist Figure 1 to Figure 12 In the schematic diagram of the present invention shown, the present invention mainly includes a base mechanism 1 , a seat mechanism 2 , a left mechanical leg mechanism 3 and a right mechanical leg mechanism 4 .
[0036] Wherein, the base plate 5 of the whole machine is a horizontal bottom plate, and the adjustable feet 6 are fixedly connected to each angle at the lower part of the base plate of the whole machine by bolts. On both sides of the lower part of the base plate of the complete machine, two adjustable feet are fixedly connected by bolts. At the bottom of the complete machine base plate, at the midpoint of each limit of the complete machine base plate, a universal caster 7 is fixedly connected by bolts, and the distance between every two adjacent universal casters is the same. The base plate of the whole machine, adjustable feet and universal casters form the base mechanism.
[0037] The upper part of the base mechanism is fixedly...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More