

Control method used for assistance exoskeleton system
A control method and exoskeleton technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of difficult to guarantee the effect of PID control, not working at zero position, etc., to achieve the effect of reducing system energy consumption and efficient and suitable assistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below in conjunction with accompanying drawing, describe technical scheme of the present invention in detail:
[0030] For the exoskeleton system targeted by the present invention, it is first necessary to respectively place pressure sensors, pressure switches, angle sensors, Inertial sensors and hydraulic sensors can sense the movement state, movement speed and movement stage of human lower limbs in real time, so as to provide real-time and accurate information for the control system. This part is a technology well known to those skilled in the art and will not be repeated here.
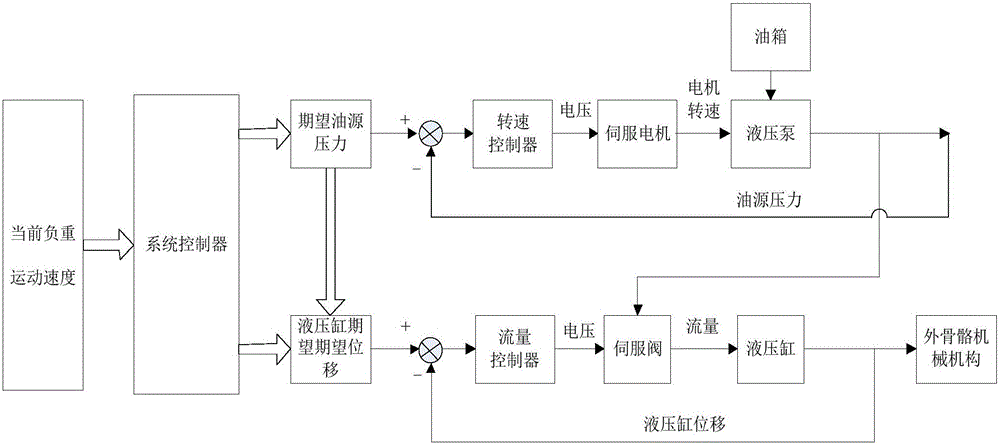
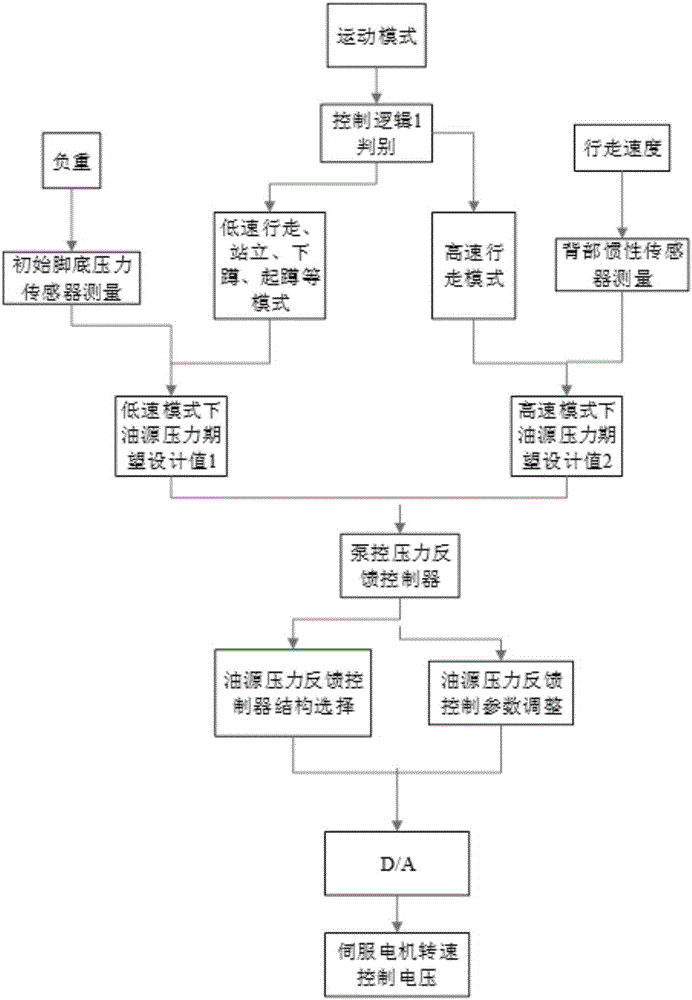
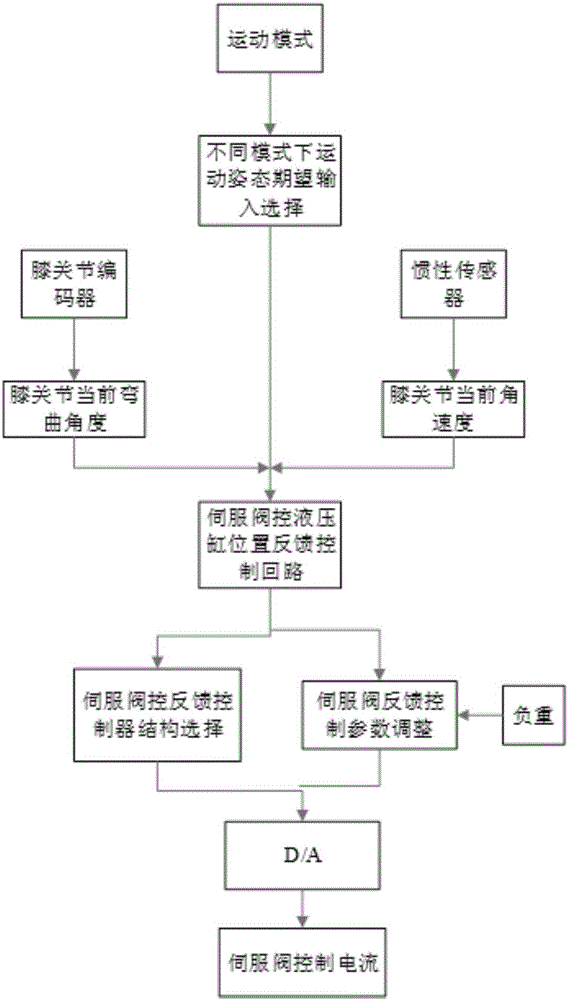
[0031] Control system of the present invention, its logic structure is as figure 1 As shown, the power control device of the power-assisted exoskeleton system is composed of a hydraulic pump controlled by a servo motor and a hydraulic cylinder controlled by a servo valve. The output value of the oil source pressure is adjusted together. The servo motor controls the output of the hydraulic pu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More