

Obstacle detection device, robot and obstacle avoidance system
An obstacle detection and detector technology, applied in the field of obstacle detection, can solve problems such as detection failure and inaccurate detection of obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0040] An embodiment of the present invention provides an obstacle detection device. The obstacle detection device includes a visual detector and an ultrasonic detector. The visual detector and the ultrasonic detector simultaneously detect the information of obstacles ahead, and can accurately detect all obstacles ahead. object information to avoid detection failures in night vision environments or when encountering obstacles such as white walls and thin lines.
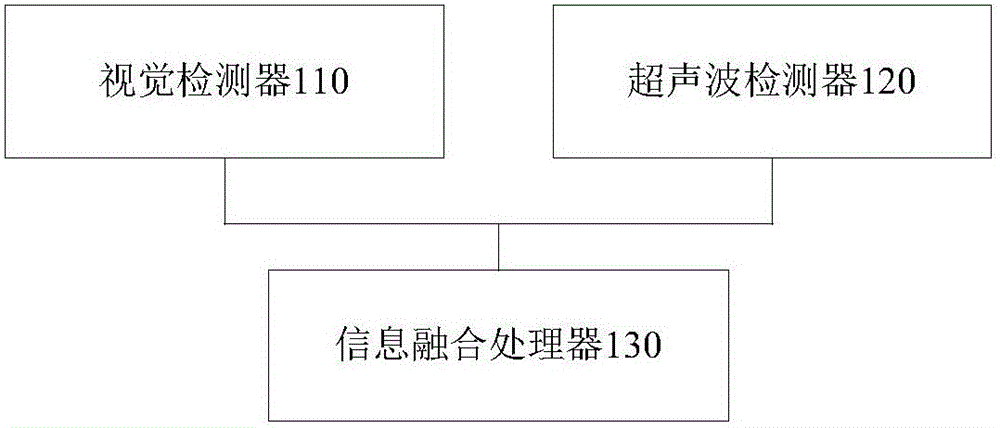
[0041] Such as figure 1 As shown, the obstacle detection device provided by the embodiment of the present invention includes a visual detector 110, an ultrasonic detector 120 and an information fusion processor 130;
[0042] Both the visual detector 110 and the ultrasonic detector 120 are connected to the information fusion processor 130;
[0043] The visual detector 110 collects the front image, and transmits the above image to the information fusion processor 130, the ultrasonic detector 120 detects the distance in...
Embodiment 2
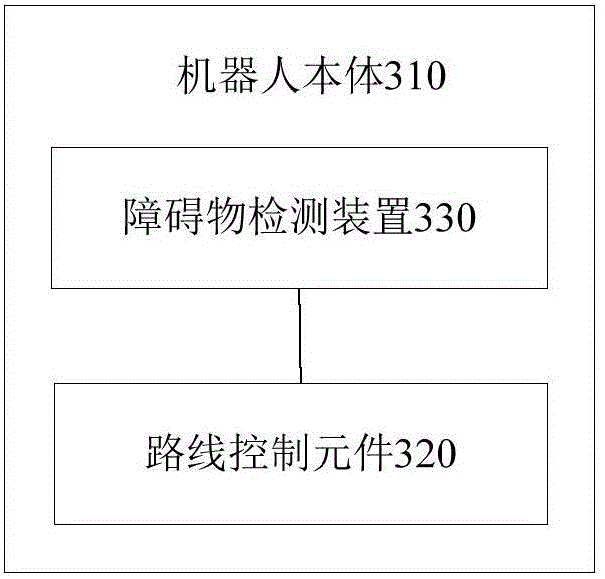
[0092] An embodiment of the present invention provides a robot, such as image 3 As shown, the robot provided in the embodiment of the present invention includes a robot body 310, a route control element 320 and an obstacle detection device 330 provided in Embodiment 1;
[0093] The obstacle detection device 330 is connected to the route control component 320, detects the obstacle information ahead, and transmits the obstacle information to the route control component 320;
[0094] The route control element 320 is connected to the robot body 310, receives the obstacle information transmitted by the obstacle detection device 330, plans the robot's running route according to the obstacle information, and controls the robot body 310 to walk according to the above-mentioned running route;
[0095] Both the route control element 320 and the obstacle detection device 330 are installed on the robot body 310 .
[0096] In order to enable the obstacle detection device 330 to detect wh...
Embodiment 3
[0100] An embodiment of the present invention provides an obstacle avoidance system, such as Figure 4 As shown, it includes a remote control terminal 410 and the robot 420 provided in Embodiment 2 above;
[0101] The remote control terminal 410 is connected with the robot 420 , receives the obstacle information transmitted by the robot 420 , generates a robot walking control signal according to the obstacle information, and transmits the control signal to the robot 420 .
[0102] The above-mentioned remote control terminal 410 can be a mobile phone, a PAD, a computer, and the like.
[0103] The above-mentioned remote control terminal 410 can be connected with one robot 420, and can also be connected with multiple robots 420, the above-mentioned Figure 4 It only shows the connection between the remote control terminal 410 and a robot 420, and does not limit the specific number of robots 420 connected to the remote control terminal 410. The number of robots 420 connected to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More