

Precise landing control method for unmanned aerial vehicle
A control method and UAV technology, applied in the direction of finding the target control, etc., can solve the problems that the UAV landing cannot be accurately controlled, the landing position judgment accuracy is poor, and it is difficult to find the bottom base station, so as to improve stability and reliability Strong, visible light effect with little interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
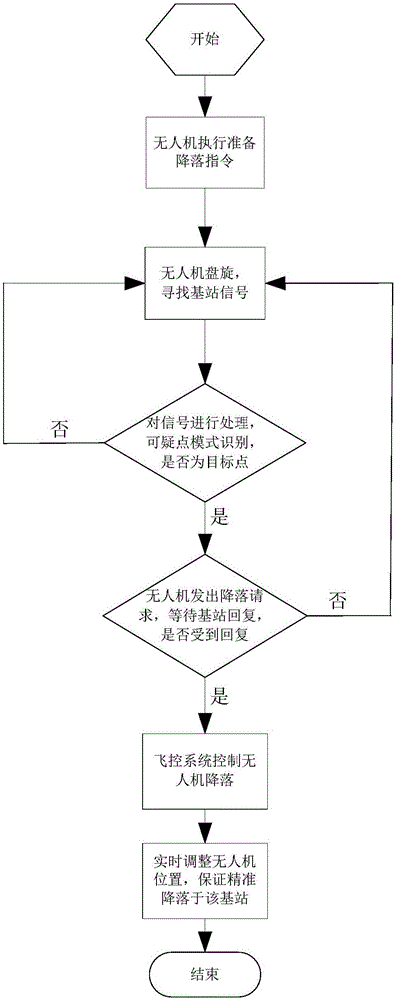
[0044] Such as figure 1 As shown, the control method for the precise landing of the UAV, the UAV includes a flight control system, a camera, and a positioning module, and the flight control system is electrically connected to the camera and the positioning module; the main frequency of the central processor of the flight control system is 1.2 Above GHz, the drone hovers in the air to find a base station that can be landed among the multiple base stations on the ground, and lands accurately. The control method includes the following steps:
[0045] Step 1, the UAV executes the command to prepare for landing, and the command is sent by the aircraft control system or the remote control device on the ground;
[0046] Step 2: The UAV starts to circle around to find the base station, shoots the base station through the camera, and transmits the captured image to the UAV control system; each base station is provided with multiple signal transmitters, and the images captured by the ca...
Embodiment 2
[0065] In this embodiment, in the third step, the captured image is denoised by first corroding and then dilating the image. The denoising process can reduce the influence of other interference factors on the UAV's judgment of the reliability of the base station. Other steps are the same as in Example 1.
Embodiment 3
[0067] In this embodiment, the pattern recognition of suspicious points in step 3 is to judge whether the flickering frequency of the infrared signal sent by the suspicious point is the same as the preset signal flickering frequency in the UAV flight control system: when the infrared signal sent by the suspicious point If the signal flashing frequency is different from the preset signal flashing frequency in the UAV flight control system, it means that the base station is a non-landing base station, and go to step 2; If the preset signal flashing frequency in the system is the same, then these suspicious points will be marked as target points, and a landing request will be sent to the base station. Other steps are the same as in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More