

Multi-sensor multi-target tracking error estimation method
A multi-target tracking and multi-sensor technology, which is applied in the field of multi-sensor multi-target tracking bias estimation to achieve the effect of effectively estimating and realizing bias
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
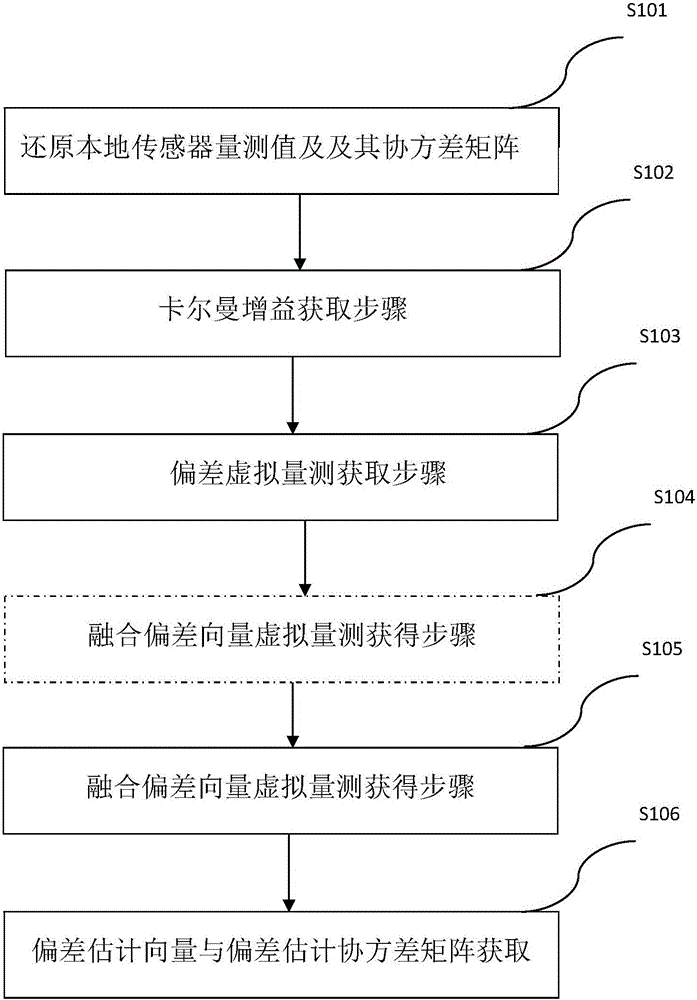
[0032] figure 1 A flow chart of a multi-sensor multi-target tracking bias estimation method according to an embodiment of the present invention is shown. Such as figure 1 As shown, according to an embodiment of the present invention, using the multi-sensor multi-objective bias estimation method to realize k=1, 2, the specific steps of the bias estimation at the time of L are:
[0033]First, in the first step S101, use the inverse Kalman filter to restore the local sensor measurement value u s (k|k) and its covariance matrix U s (k|k), the specific formula is as follows:
[0034]
[0035]
[0036]
[0037] A s (k|k)=P s (k|k')[D s (k|k)] -1 (4)
[0038] D. s (k|k)=P s (k|k')-P s (k|k) (5)
[0039]
[0040] Since this article involves some formulas, in order to facilitate understanding, the meanings of the symbols involved are summarized as follows: In this article, b refers to the deviation vector, f refers to the meaning of fusion in English, t refers ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More