

Pedestrian tracking method based on least square locus prediction and intelligent obstacle avoidance model
A least squares, intelligent obstacle avoidance technology, applied in the field of image processing, can solve problems such as color change, deviation, multi-target tracking occlusion, etc., to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The following is attached with the manual picture The technical scheme of the present invention is described in detail:
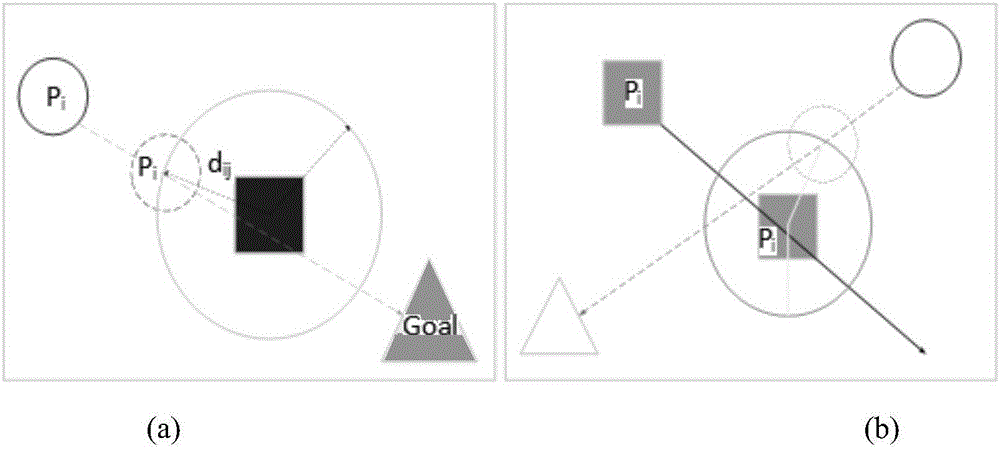
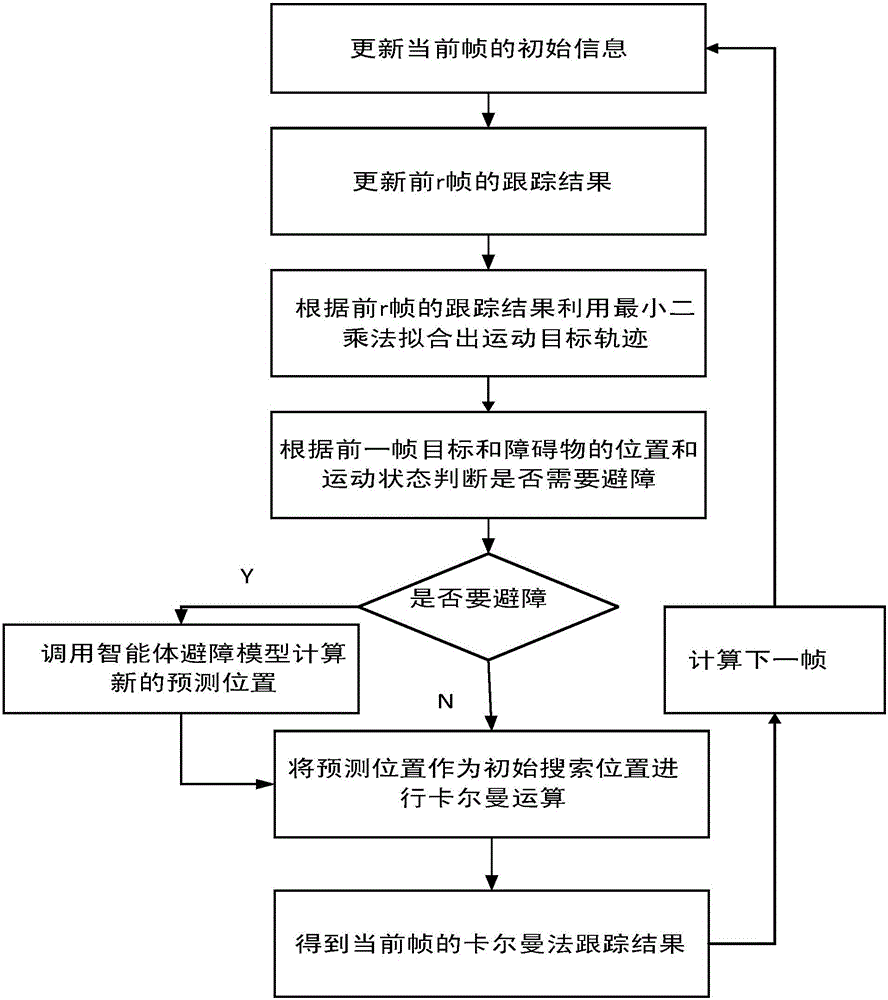
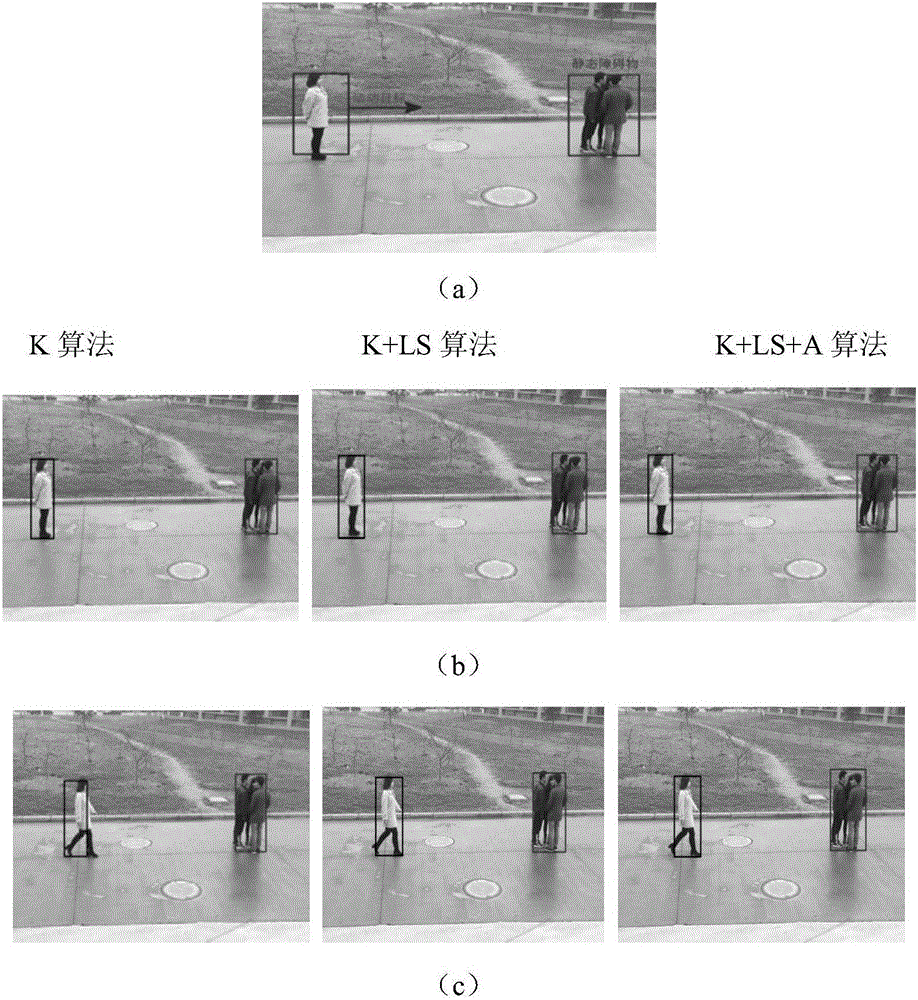
[0039] The present invention provides a pedestrian tracking method based on least squares trajectory prediction and intelligent obstacle avoidance model. The realization idea is as follows: firstly, the traditional Kalman algorithm is used to realize initial target tracking, and improvements are made to address its shortcomings; then Aiming at the high follow-up and wrong rate of pedestrian tracking by Kalman method, the least square method is proposed to fit the pedestrian motion curve, predict the pedestrian's position in the next video frame, and use this position as the initial moving target to search; Finally, due to the particularity of pedestrians, their psychology and exercise habits will greatly affect their movement, which is more random. Aiming at this characteristic, a combination of adaptive obstacle avoidance algorithm is proposed to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More