Surgical robot manipulator arm with self-adaptability
A surgical robot, self-adaptive technology, applied in surgical robot, surgery, medical science, etc., can solve the problems of reduced flexibility, restricted tool freedom, bulky, etc., to improve self-adaptive ability, reduce structural complexity, reduce The effect of the moment of inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with specific embodiments.
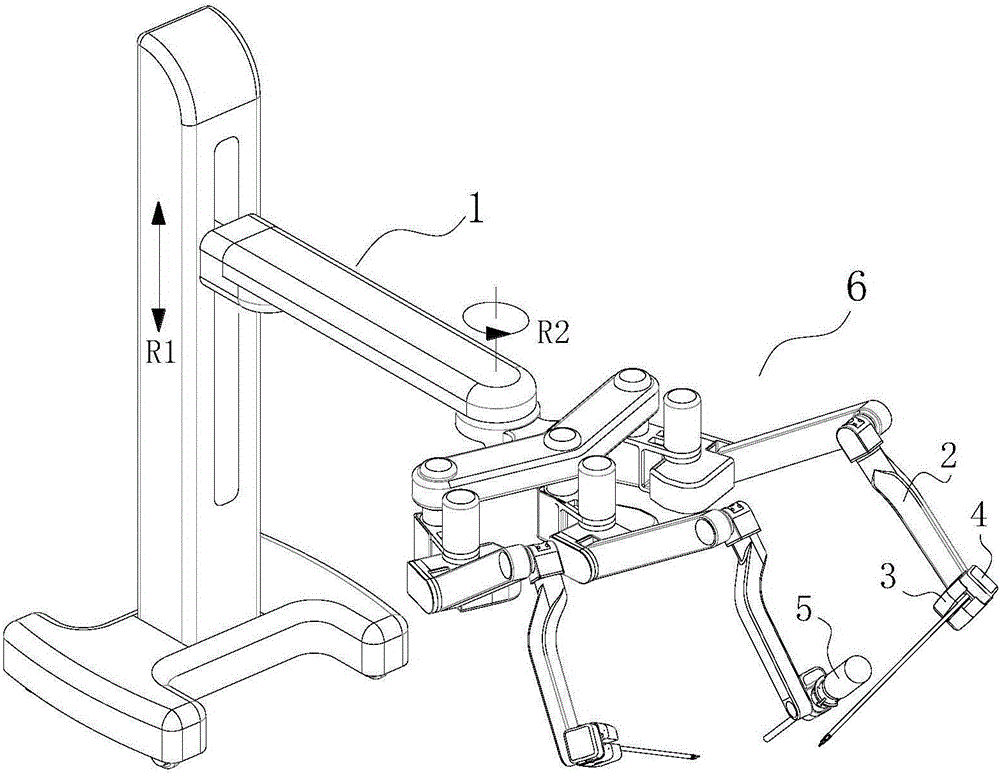
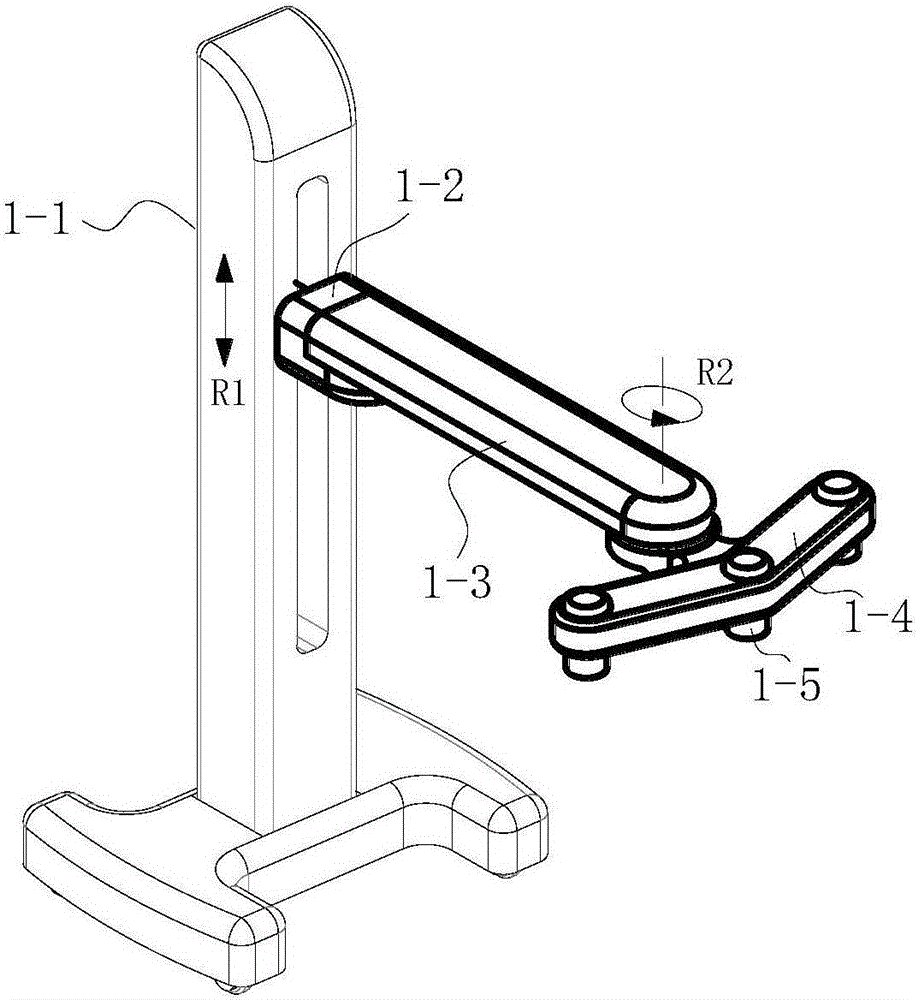
[0037] As shown in the accompanying drawings, the robotic manipulator arm with self-adaptive capability includes a passive adjustment structure 1 and an active structure 6. The passive adjustment structure 1 includes a body base 1-1, and a support beam 1-1 arranged along the horizontal direction. The rear end of 3 is connected to the main body base 1-1 through the lifting mechanism and can slide up and down on the main body base 1-1 in the vertical direction under the drive of the lifting mechanism to realize the lifting degree of freedom of the passive adjustment structure 1 R1, the front end of the support beam 1-3 is connected with an arc-shaped deflection frame 1-4 so that the two form a rotating joint, and a brake is fixedly installed on the support beam 1-3, and the brake The rotating shaft is fixedly connected with the arc deflection frame. The brake is connected ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap