

Six-axis universal robot with mechanical paws arranged on small arms
A mechanical claw and robot technology, applied in the field of robots, can solve the problem of difficulty in improving the work efficiency of robots, and achieve the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
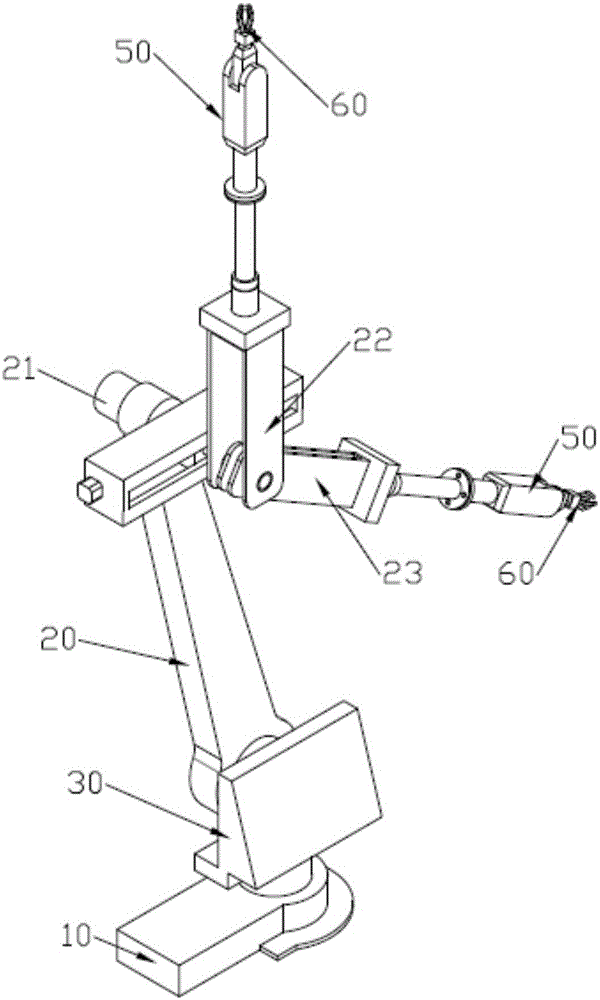
[0035] like Figure 1 to Figure 5 As shown, a pair of forearms is equipped with a six-axis universal robot with mechanical grippers, including a base body 10, a waist swivel part 30 pivotally connected to the base body 10, a big arm 20 pivotally connected to the waist swivel part 30, For the small arm installed on the big arm 20, the waist turning part 30 rotates around the base body 10, and the big arm 20 turns around the waist turning part 30; the upper end of the big arm 20 is fixed with a first drive motor 21; the output shaft of the first drive motor 21 A sliding device 24 is fixed on the top; a manipulator assembly is provided on the small arm;
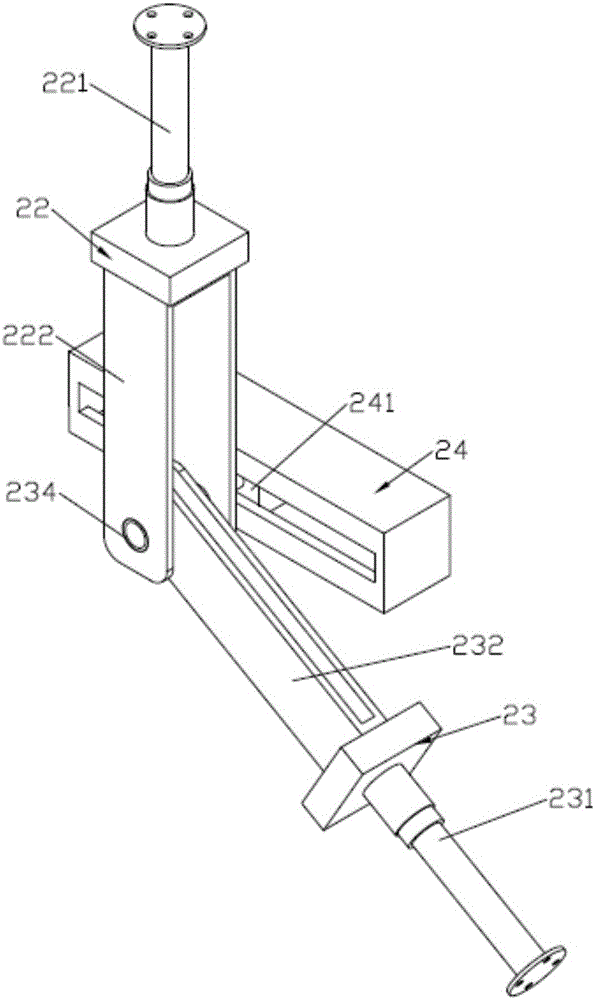
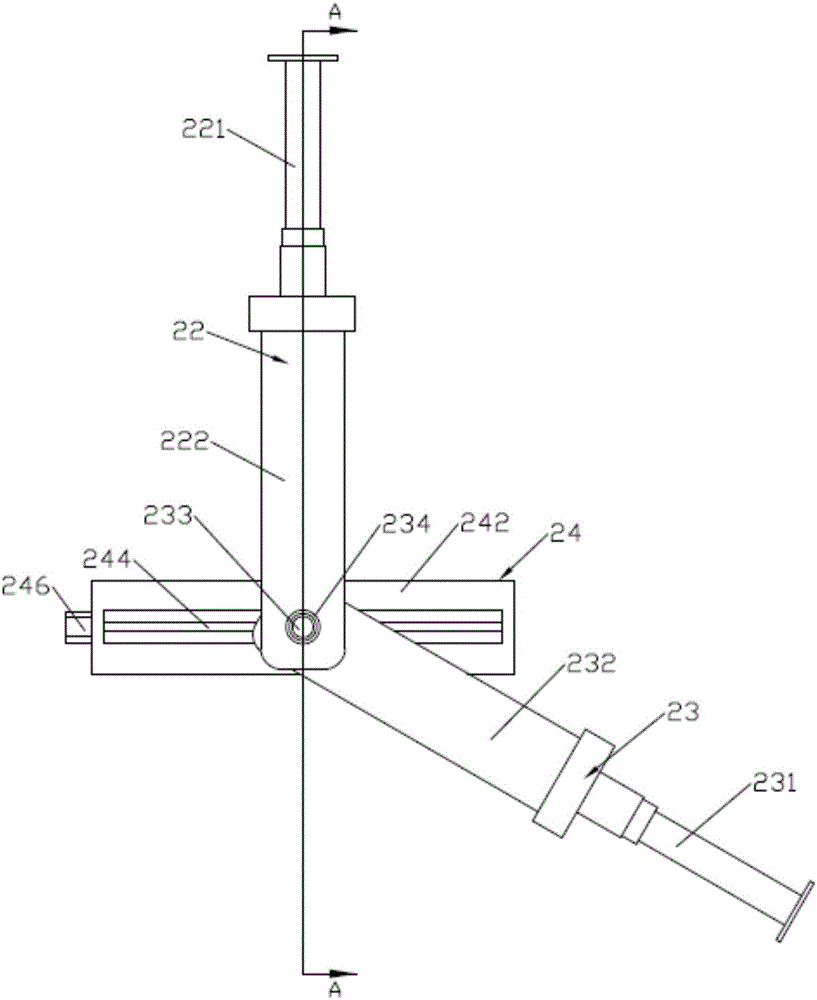
[0036] like Figure 1 to Figure 5As shown, the small arm includes a first small arm 22 and a second small arm 23, and the first small arm 22 and the second small arm 23 are installed on the boom 20 through a split mechanism; the split mechanism includes a drive shaft 233, A pair of cylindrical rings 234, the first forearm driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More