

Master-slave mode snake-like robot system and position control method thereof
A technology of snake-like robot and main robot, applied in the direction of program control manipulator, manipulator, manufacturing tool, etc., can solve problems such as poor real-time control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
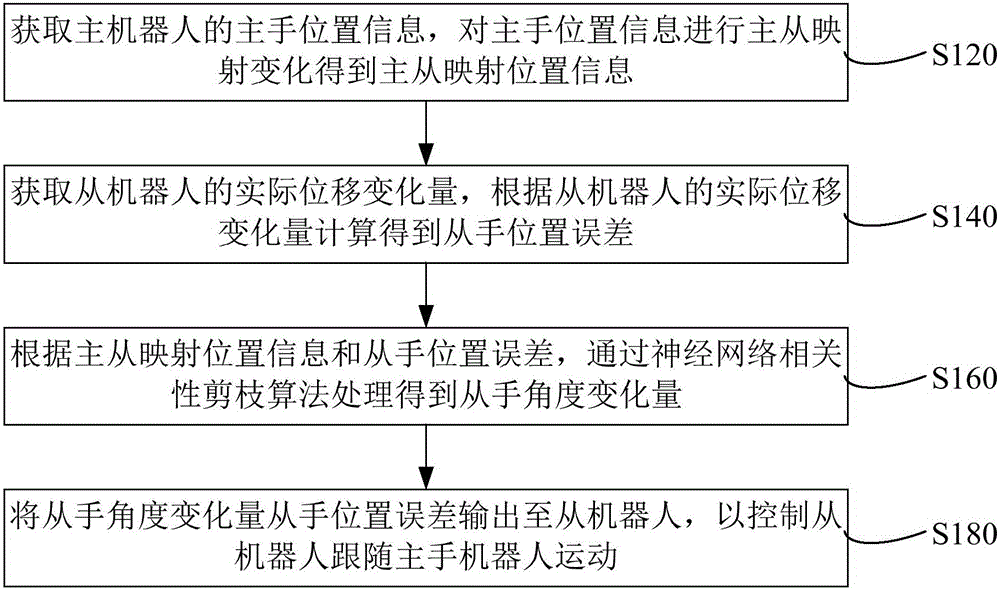
[0022] In one embodiment, a position control method of a master-slave snake robot system, such as figure 1 shown, including the following steps:
[0023] Step S120: Obtain the position information of the master hand of the master robot, and perform master-slave mapping changes on the position information of the master hand to obtain position information of the master-slave map.
[0024] Specifically, the master-slave control system can receive the master-hand movement command of the master robot, and obtain the position change information of each joint of the master-hand in the master robot according to the master-hand motion command. Position change information in a Cartesian space coordinate system. It can be understood that in other embodiments, the position change information of each joint of the main hand may also be collected directly.
[0025] After the master-hand position information of the master robot is collected, according to the preset master-slave mapping rela...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More